【深度学习-目标检测】03 - Faster R-CNN 论文学习与总结
论文地址:Faster R-CNN: Towards Real-Time ObjectDetection with Region Proposal Networks
论文学习
1. 摘要与引言
- 研究背景与挑战:当前最先进的目标检测网络依赖于 区域提议(Region Proposals)来假设目标的位置,尽管最新的技术(Fast R-CNN 和 SPPnet)以及减少了网络的运行和训练时间,但是区域提议(Region Proposals)依旧是一个瓶颈部分。
- 区域提议网络(RPN):论文提出一个新的区域提议网络,它与检测网络共享全图像的卷积特征图,这代表RPN不需要额外成本,它是一个全卷积网络,能够同时在每个位置预测目标边界和目标性分数。
- 端到端的训练:RPN可以端到端的进行训练,以生成高质量的区域提议(RPN),这些提议随后被用于Fast R-CNN 进行目标检测。
- 性能提升:使用VGG-16模型的检测系统在GPU上的处理速度可以达到每秒5帧,同时在一些目标检测数据集上实现了当时最先进的目标检测精度。
2. 相关工作
-
目标提议方法:这部分回顾了目标提议方法的广泛文献。目标提议方法可以分为两大类:基于分组超像素的方法(例如Selective Search、CPMC、MCG)和基于滑动窗口的方法(例如窗口中的对象性、EdgeBoxes)。这些方法通常作为独立于检测器的外部模块被采用,例如Selective Search用于R-CNN和Fast R-CNN。
-
深度网络用于目标检测:这部分讨论了如何使用深度网络预测目标边界框。R-CNN方法训练CNN来分类提议区域为目标类别或背景,但它本身不预测对象边界(除了通过边界框回归进行细化)。R-CNN的准确性依赖于区域提议模块的性能。此外,还有几篇论文提出了使用深度网络预测目标边界框的方法,例如OverFeat方法训练一个全连接层来预测定位任务的边界框坐标。
3. Faster R-CNN
- Faster R-CNN系统概述:
- Faster R-CNN是一个统一的目标检测系统,由两个模块组成:一个深度全卷积网络用于提出区域(Region Proposal Network, RPN),另一个是Fast R-CNN检测器,用于利用这些提议区域进行目标检测。(大致理解为 Faster R-CNN = Fast R-CNN + RPN)
- 系统将RPN和Fast R-CNN合并为一个网络,其中RPN模块指导Fast R-CNN模块应该关注的区域。
- 区域提议网络(RPN):
- RPN接受任意大小的图像作为输入,输出一组矩形对象提议,每个提议都有一个对象性分数。
- RPN是一个全卷积网络,它在最后一个共享卷积层的卷积特征图上滑动一个小网络,该小网络同时进行边界框回归和对象性分类。
- RPN设计用于高效预测多种尺度和长宽比的区域提议。
- 锚点(Anchors):
- 在每个滑动窗口位置,RPN同时预测多个区域提议,每个位置的最大可能提议数量为k。
- 提议是相对于k个参考框(锚点)参数化的。默认情况下,使用3种尺度和3种长宽比,每个滑动位置有k=9个锚点。
- 损失函数:
- RPN的训练涉及为每个锚点分配二元类别标签(对象或非对象)。
- 损失函数结合了分类损失和回归损失,用于端到端训练RPN。
- 训练RPN:
- RPN可以通过反向传播和随机梯度下降(SGD)端到端训练。
- 训练过程采用“图像中心”采样策略,每个小批量来自包含许多正负示例锚点的单个图像。
- 共享特征用于RPN和Fast R-CNN:
- 描述了如何训练一个网络用于区域提议生成,同时考虑将这些提议用于基于区域的目标检测CNN。
- 提出了几种训练具有共享特征的网络的方法,包括交替训练、近似联合训练和非近似联合训练。
- 实现细节:
- 训练和测试都在单一尺度的图像上进行。
- 对于锚点,使用3种尺度和3种长宽比。
- 在训练期间忽略越过图像边界的锚点,以避免在目标函数中引入大的、难以纠正的误差项。
4. 实验
- 实验设置:
- 实验在PASCAL VOC 2007和2012数据集上进行,这些数据集包含多种目标类别。
- 使用了两种不同的网络架构:ZF网络和VGG-16网络,来评估Faster R-CNN的性能。
- 基准测试:
- 对比了使用不同区域提议方法(如Selective Search、EdgeBoxes和RPN)的Fast R-CNN检测器的性能。
- 展示了RPN在生成高质量区域提议方面的有效性,特别是在使用较少的提议数量时。
- 消融实验:
- 进行了一系列消融实验来分析RPN的不同组成部分对性能的影响,例如共享卷积层、分类和回归层的作用等。
- 评估了使用不同数量的区域提议对最终目标检测精度的影响。
- 不同网络架构的影响:
- 比较了使用ZF网络和VGG-16网络的RPN在目标检测任务上的性能差异。
- 展示了更强大的网络架构(如VGG-16)可以提高RPN的区域提议质量。
- 在MS COCO数据集上的实验:
- 在MS COCO数据集上进一步验证了Faster R-CNN的性能。
- 调整了一些实现细节,如训练时的mini-batch大小和锚点的设置,以适应COCO数据集上的小目标检测。
- 从MS COCO到PASCAL VOC的迁移学习:
- 探讨了在MS COCO数据集上预训练模型并在PASCAL VOC数据集上微调的效果。
- 展示了使用大规模数据集预训练可以显著提高在小规模数据集上的检测性能。
- 系统的运行时间分析:
- 提供了整个目标检测系统的运行时间分析,包括不同部分的耗时(如卷积、区域提议和区域分类)。
- 展示了Faster R-CNN系统在保持高精度的同时实现了接近实时的检测速度。
6. 结论
-
高效准确的区域提议:论文提出了区域提议网络(RPN),用于高效且准确地生成区域提议。这是实现高性能目标检测的关键步骤。
-
共享卷积特征:通过与下游的目标检测网络共享卷积特征,RPN使得区域提议步骤的成本几乎为零。这种共享机制显著提高了计算效率。
-
统一的深度学习检测系统:该方法实现了一个统一的基于深度学习的目标检测系统,能够以接近实时的帧率运行。这对于需要快速响应的应用场景非常重要。
-
提升区域提议质量和检测准确性:通过学习得到的RPN不仅提高了区域提议的质量,也因此提升了整体的目标检测准确性。
这篇论文《Faster R-CNN: Towards Real-Time ObjectDetection with Region Proposal Networks》的主要创新点和贡献可以总结如下:
-
高效准确的区域提议:论文介绍了区域提议网络(RPN),这是一种高效生成准确区域提议的方法。RPN通过共享卷积特征,减少了区域提议步骤的计算成本。
-
统一的检测系统:Faster R-CNN将RPN和Fast R-CNN目标检测网络结合成一个统一的网络。这种设计使得整个目标检测系统能够以接近实时的帧率运行。
-
改进的检测准确性:RPN不仅提高了区域提议的效率,还通过生成高质量的提议来提高了整体的目标检测准确性。
-
深度学习的优势:Faster R-CNN展示了深度学习在目标检测领域的强大潜力。特别是,RPN完全通过神经网络学习生成区域提议,从而能够从更深、更表达性强的特征中受益。
-
大规模数据集的重要性:论文还探讨了在大规模数据集(如MS COCO)上预训练模型对于提高小规模数据集(如PASCAL VOC)上的检测性能的重要性。
-
实时性和准确性的平衡:Faster R-CNN成功地平衡了高准确性和高速度的需求,使得它在实际应用中非常有用。
Faster R-CNN
其实 Faster R-CNN 的本质就是 将 Fast R-CNN 中的 区域提议的选择性搜索(Selective Search)更换成了 RPN 网络,因为RPN网络能够给 Fast R-CNN 后面的目标检测网络提供质量更好的候选框。
关于R-CNN 和 Fast R-CNN 的详细内容可以参见:
R-CNN
Fast R-CNN
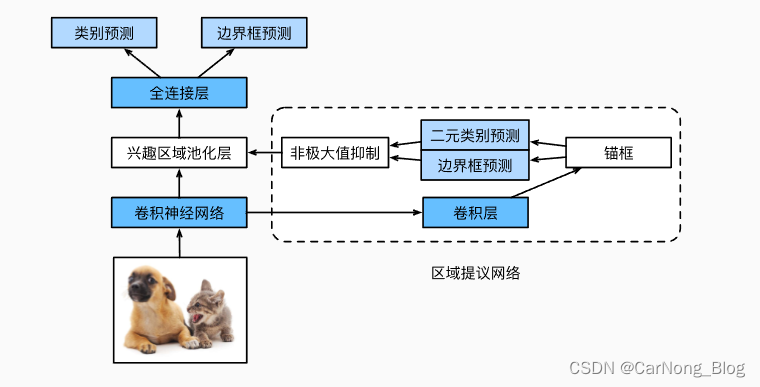
所以这里主要介绍 RPN 网络的详细工作流程:
- 输入和卷积特征提取:
- RPN接收一张任意大小的图像作为输入。
- 输入图像首先通过一系列共享的卷积层进行处理,这些层也被后续的Fast R-CNN目标检测网络使用。这一步骤生成了图像的卷积特征图。
- 滑动窗口和锚点(Anchors):
- RPN在卷积特征图上使用一个小型网络,这个网络在特征图上以滑动窗口的方式运行。
- 每个滑动窗口位置对应多个锚点。锚点是预定义的固定大小和长宽比的矩形框,用于捕捉不同尺度和长宽比的对象。
- 分类和边界框回归:
- 对于每个锚点,RPN使用两个输出层来进行预测:
- 一个分类层(cls layer):预测锚点是前景(即有目标对象)还是背景。
- 一个边界框回归层(reg layer):调整锚点的位置和大小,使其更好地匹配潜在的目标对象。
- 对于每个锚点,RPN使用两个输出层来进行预测:
- 生成区域提议:
- RPN将分类得分高的锚点(即可能包含目标的锚点)和经过回归调整后的边界框作为区域提议输出。
- 通常会使用非极大值抑制(Non-Maximum Suppression, NMS)来减少重叠的提议,从而筛选出一组具有代表性的提议。
以上内容旨在记录自己的学习过程以及复习,如有错误,欢迎批评指正,谢谢阅读。