当前位置: 首页 > news >正文 基于卡尔曼滤波的平面轨迹优化 news 来源:原创 2024/5/20 10:41:54 文章目录 概要卡尔曼滤波代码主函数代码CMakeLists.txt 概要 在进行目标跟踪时,算法实时测量得到的目标平面位置,是具有误差的,连续观测,所形成的轨迹如下图所示,需要对其进行噪声滤除。这篇博客将使用卡尔曼滤波,对轨迹进行优化。 优化的结果为黄色线。 卡尔曼滤波代码 #include <iostream> 相关文章: 《动手学深度学习(PyTorch版)》笔记3.2 数据结构和算法笔记5:堆和优先队列 MYSQL数据库基本操作-DQL-基本查询 day34WEB 攻防-通用漏洞文件上传黑白盒审计逻辑中间件外部引用 CentOS 7 下安装 Docker 及配置阿里云加速服务 浅析大数据汇总 PyTorch初探:基本函数与案例实践 HCIP之MPLS实验 TensorFlow2实战-系列教程4:数据增强:keras工具包/Data Augmentation HTML — 区块元素 嵌入式Linux系统下的智能家居能源管理系统的设计与实现 NIO-Selector详解 Java 基于SpringBoot+Vue的母婴商城系统,附源码,文档 React Hooks大全—useRef Kafka-服务端-GroupCoordinator 【Leetcode】101. 对称二叉树 2017-09-12 前端日报 - C#编程大幅提高OUTLOOK的邮件搜索能力! Consul Config 使用Git做版本控制的实现 Effective Java 笔记(一) Java程序员幽默爆笑锦集 Java到底能干嘛? Mysql数据库的条件查询语句 php ci框架整合银盛支付 TypeScript迭代器 win10下安装mysql5.7 基于MaxCompute打造轻盈的人人车移动端数据平台 #WEB前端(HTML属性) #微信小程序(布局、渲染层基础知识) (11)MATLAB PCA+SVM 人脸识别 (4)(4.6) Triducer (超详细)语音信号处理之特征提取 (二)pulsar安装在独立的docker中,python测试 (二)学习JVM —— 垃圾回收机制 (分类)KNN算法- 参数调优 (机器学习-深度学习快速入门)第一章第一节:Python环境和数据分析 (六)c52学习之旅-独立按键 (论文阅读笔记)Network planning with deep reinforcement learning .NET Framework 服务实现监控可观测性最佳实践 .NET MVC之AOP .net对接阿里云CSB服务 @Async注解的坑,小心 @DateTimeFormat 和 @JsonFormat 注解详解 [ vulhub漏洞复现篇 ] Apache Flink目录遍历(CVE-2020-17519) []Telit UC864E 拨号上网 [04]Web前端进阶—JS伪数组 [1] 平面(Plane)图形的生成算法 [383] 赎金信 js [BZOJ] 2427: [HAOI2010]软件安装 [CF494C]Helping People [CISCN2019 华北赛区 Day1 Web2]ikun [Flutter]设置应用包名、名称、版本号、最低支持版本、Icon、启动页以及环境判断、平台判断和打包 [HITCON 2017]SSRFme perl语言的 GET open file 造成rce [HUBUCTF 2022 新生赛] [IE9] GPU硬件加速到底是实用创新还是噱头
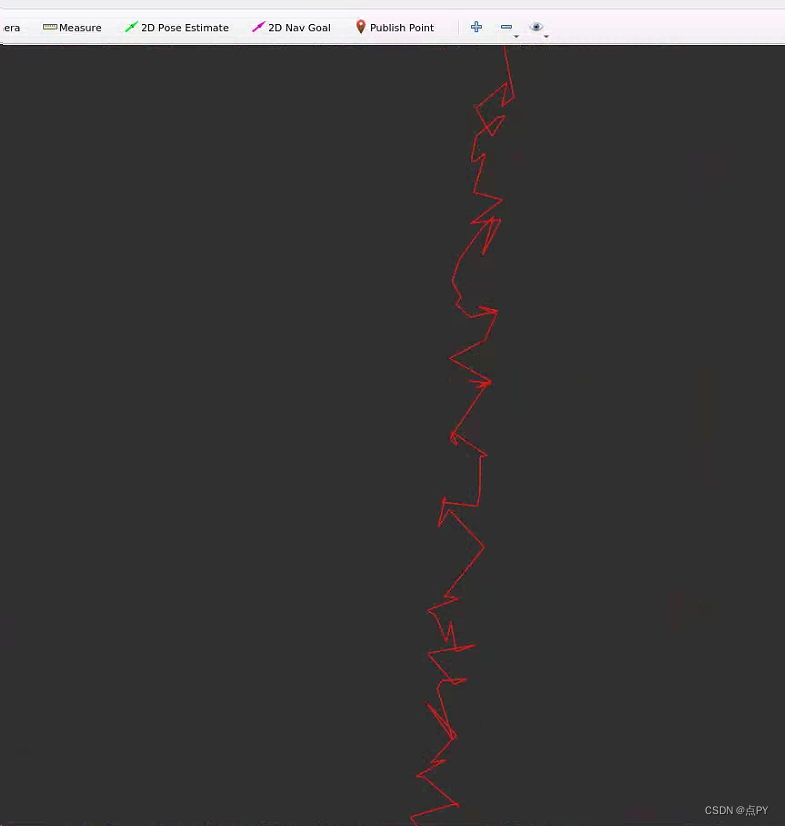
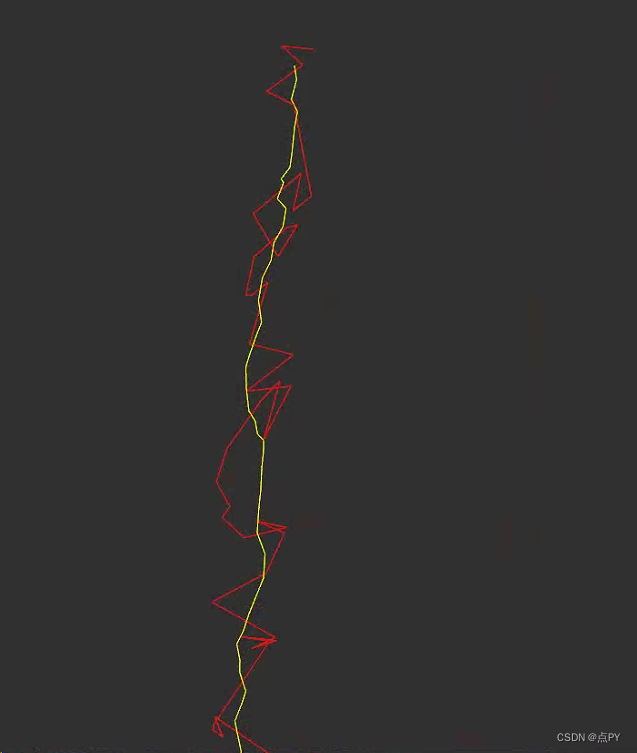
文章目录 概要卡尔曼滤波代码主函数代码CMakeLists.txt 概要 在进行目标跟踪时,算法实时测量得到的目标平面位置,是具有误差的,连续观测,所形成的轨迹如下图所示,需要对其进行噪声滤除。这篇博客将使用卡尔曼滤波,对轨迹进行优化。 优化的结果为黄色线。 卡尔曼滤波代码 #include <iostream> 相关文章: 《动手学深度学习(PyTorch版)》笔记3.2 数据结构和算法笔记5:堆和优先队列 MYSQL数据库基本操作-DQL-基本查询 day34WEB 攻防-通用漏洞文件上传黑白盒审计逻辑中间件外部引用 CentOS 7 下安装 Docker 及配置阿里云加速服务 浅析大数据汇总 PyTorch初探:基本函数与案例实践 HCIP之MPLS实验 TensorFlow2实战-系列教程4:数据增强:keras工具包/Data Augmentation HTML — 区块元素 嵌入式Linux系统下的智能家居能源管理系统的设计与实现 NIO-Selector详解 Java 基于SpringBoot+Vue的母婴商城系统,附源码,文档 React Hooks大全—useRef Kafka-服务端-GroupCoordinator 【Leetcode】101. 对称二叉树 2017-09-12 前端日报 - C#编程大幅提高OUTLOOK的邮件搜索能力! Consul Config 使用Git做版本控制的实现 Effective Java 笔记(一) Java程序员幽默爆笑锦集 Java到底能干嘛? Mysql数据库的条件查询语句 php ci框架整合银盛支付 TypeScript迭代器 win10下安装mysql5.7 基于MaxCompute打造轻盈的人人车移动端数据平台 #WEB前端(HTML属性) #微信小程序(布局、渲染层基础知识) (11)MATLAB PCA+SVM 人脸识别 (4)(4.6) Triducer (超详细)语音信号处理之特征提取 (二)pulsar安装在独立的docker中,python测试 (二)学习JVM —— 垃圾回收机制 (分类)KNN算法- 参数调优 (机器学习-深度学习快速入门)第一章第一节:Python环境和数据分析 (六)c52学习之旅-独立按键 (论文阅读笔记)Network planning with deep reinforcement learning .NET Framework 服务实现监控可观测性最佳实践 .NET MVC之AOP .net对接阿里云CSB服务 @Async注解的坑,小心 @DateTimeFormat 和 @JsonFormat 注解详解 [ vulhub漏洞复现篇 ] Apache Flink目录遍历(CVE-2020-17519) []Telit UC864E 拨号上网 [04]Web前端进阶—JS伪数组 [1] 平面(Plane)图形的生成算法 [383] 赎金信 js [BZOJ] 2427: [HAOI2010]软件安装 [CF494C]Helping People [CISCN2019 华北赛区 Day1 Web2]ikun [Flutter]设置应用包名、名称、版本号、最低支持版本、Icon、启动页以及环境判断、平台判断和打包 [HITCON 2017]SSRFme perl语言的 GET open file 造成rce [HUBUCTF 2022 新生赛] [IE9] GPU硬件加速到底是实用创新还是噱头