哈工大团队顶刊发布!由单偏心电机驱动的爬行机器人实现多方向运动传递
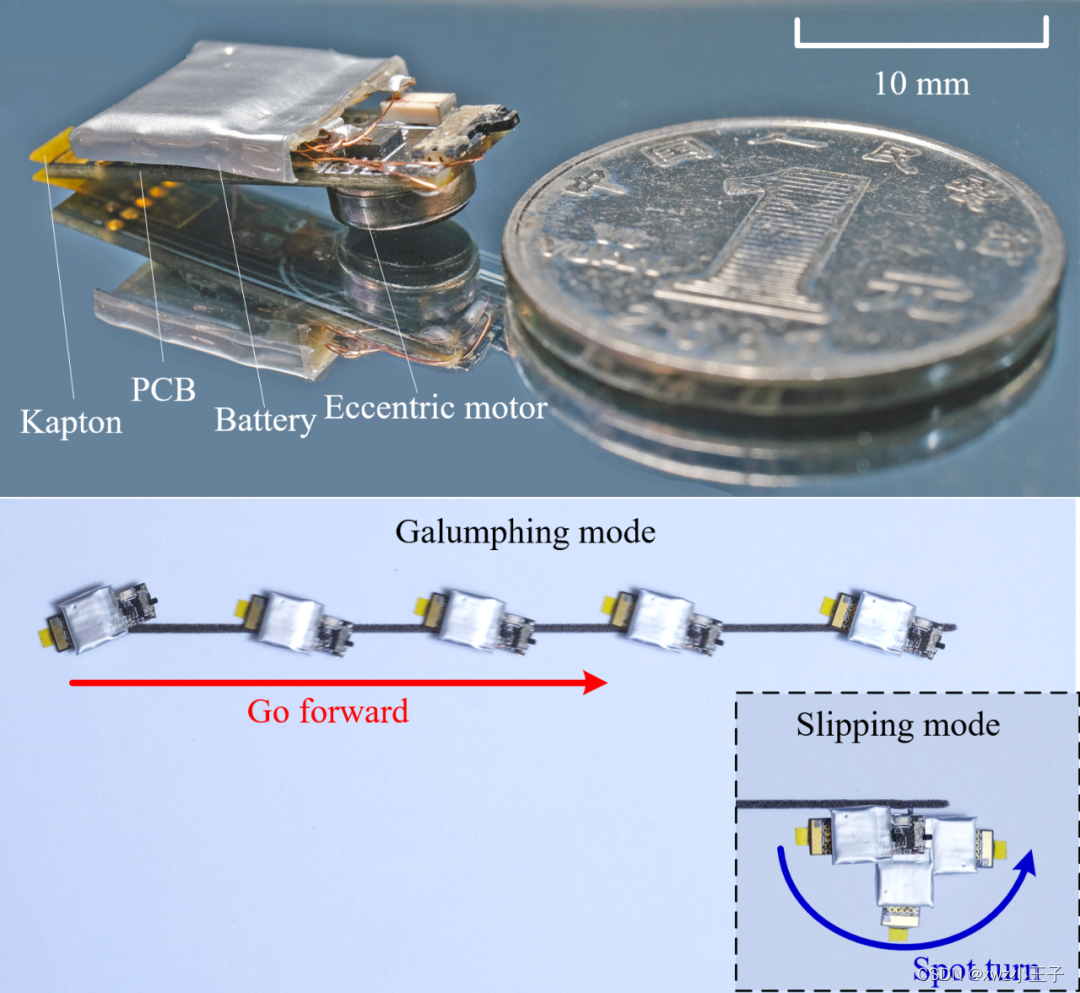
单电机也能驱动平面内前进和转弯运动?没错,图中的机器人名叫GASR,仅由四个零件组成,分别是偏心电机、电池、电路板、聚酰亚胺薄片,它可以灵活自如地实现前进、转弯等移动。其中的核心驱动器——纽扣式偏心转子电机产自立得微电子,与很多智能设备中的振动电机一样,但究竟是什么原理,能让单个驱动器实现这样灵活的运动呢?

在不同的恒压驱动下,机器人具有不同的偏转方向,那么在顺时针转弯和逆时针转弯之间,存在某一个恒压驱动源使机器人直行。
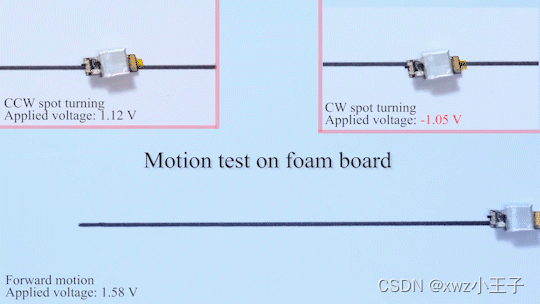
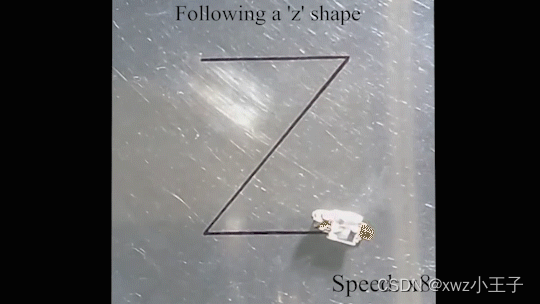
基于这样的运动性能,可以实现灵活的轨迹跟踪
该研究成果以Regular Paper形式发表在国际知名期刊《Advanced Science》上,通讯作者为哈尔滨工业大学(深圳)李兵教授,李曜副教授,(共同)第一作者为硕士研究生唐灵奇,王诚昊。该研究探讨了一种类似海豹踱步跳动的全新驱动方法,可以使刚体机器人实现欠驱动下的直行、弧行、转向等灵活运动。为单电机驱动的移动机器人设计提供新的思路。
▍奇妙的踱步跳动
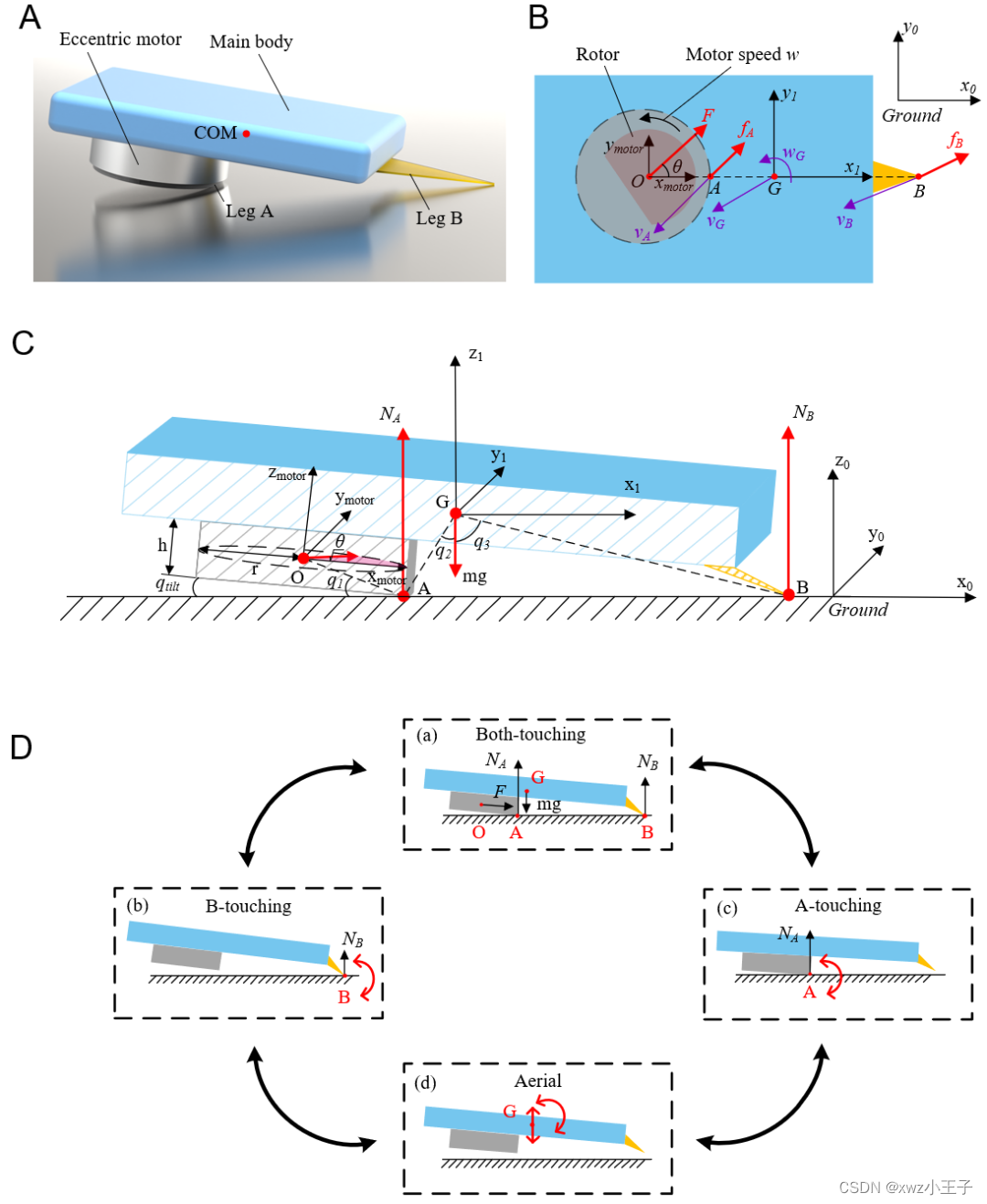
大部分昆虫尺度的微型移动机器人集成了多执行器以确保灵活性,但系统复杂度限制了进一步微型化。反之,只采用一个执行器的机器人在平面运动方面存在灵活性和精度的严重不足。为解决这一问题,团队引入了一项创新的技术,即偏心力驱动的多方向运动传递(ERDMT),采用了新颖的倾斜偏心电机和双腿结构实现平面运动。基于此技术的机器人仅由四个零件组成,重量仅1.2 g,量产成本仅 $3.7。
机器人在竖直平面内的平面运动呈现一种独特的运动类型,类似于海豹的踱步跳动:通过交替抬起前后身体来完成向前运动。

在这项研究中,团队介绍了一种基于振动的踱步跳动运动传输技术,系统成功实现了稳定的微观尺度(30–400 µm)的踱步跳动运动。这一原型能够通过简单的电机调速(PWM)实现前进运动和横向偏转,而无需电机相位反转。这一现象被称为偏心力驱动的多方向运动传递(ERDMT),为平面运动传输提供了一种直接的方法。
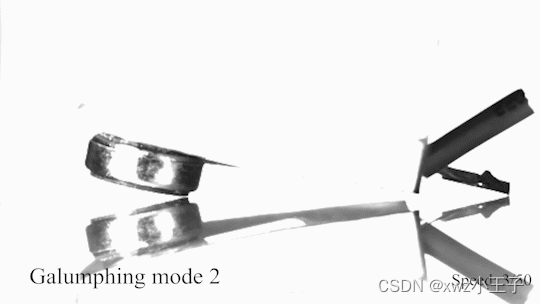
上图展示了一个典型的运动序列的高速摄影,其中机器人在不同阶段表现出触地、抬腿和转动等动作。
▍动力学模型的建立和验证
为了进一步探究该机器人的运动原理,团队针对踱步跳跃运动和平面内运动建立了一个动力学模型。模型显示:当电机输出足够大以使机器人在空中运动时,机器人就能够执行踱步跳动,关键在于该运动具有很好的周期性。一个完整的踱步跳动周期包括两腿触地、A腿触地、B腿触地和空中四个阶段。
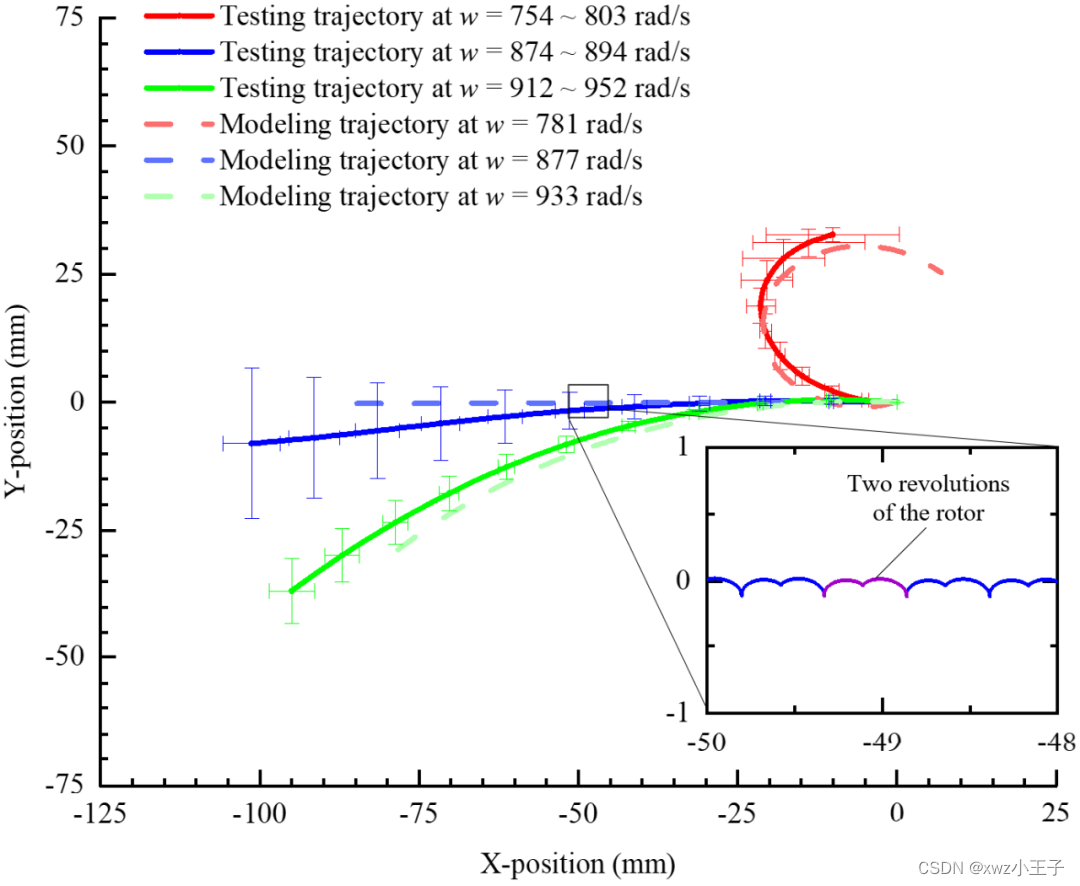
正是由于微观运动的周期性,才能使机器人能够自主改变宏观运动轨迹。不同的恒压驱动,对应不同的电机转速,同时对应不同的宏观轨迹。
▍ERDMT的原理解释
最后,到底为什么机器人可以改变运动方向(ERDMT)?为什么在不同的恒压激励源下,机器人可以实现正转、反转和直行?这些现象的核心原理,就是在周期性运动下,不同触地时序带来的地面反力的变化。
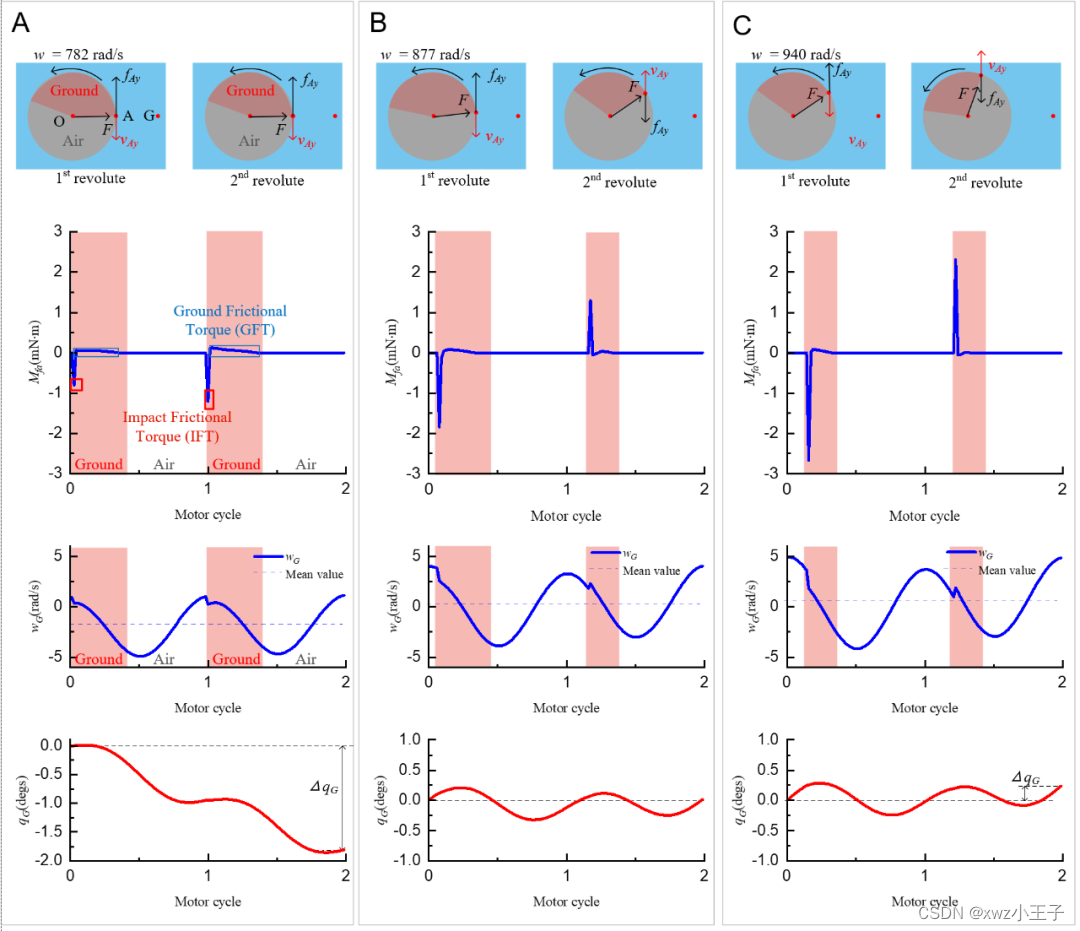
由实验和建模仿真结果可知,当机器人受到不同的恒定电机转速驱动时,具备不同的平面运动轨迹,甚至可分别实现顺时针转弯,逆时针转弯和直行。这个新现象是由不同稳态的触地时序不同导致的。接下来将深入分析其中原理。下图表示在某个电机转速下,两个电机周期对应至少一个机器人运动周期。圆圈代表电机转子的相位,红色区域代表腿A接触地面期间时电机的相位,灰色区域代表腿A在空中时电机的相位。
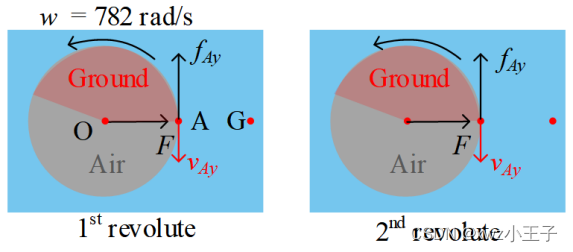
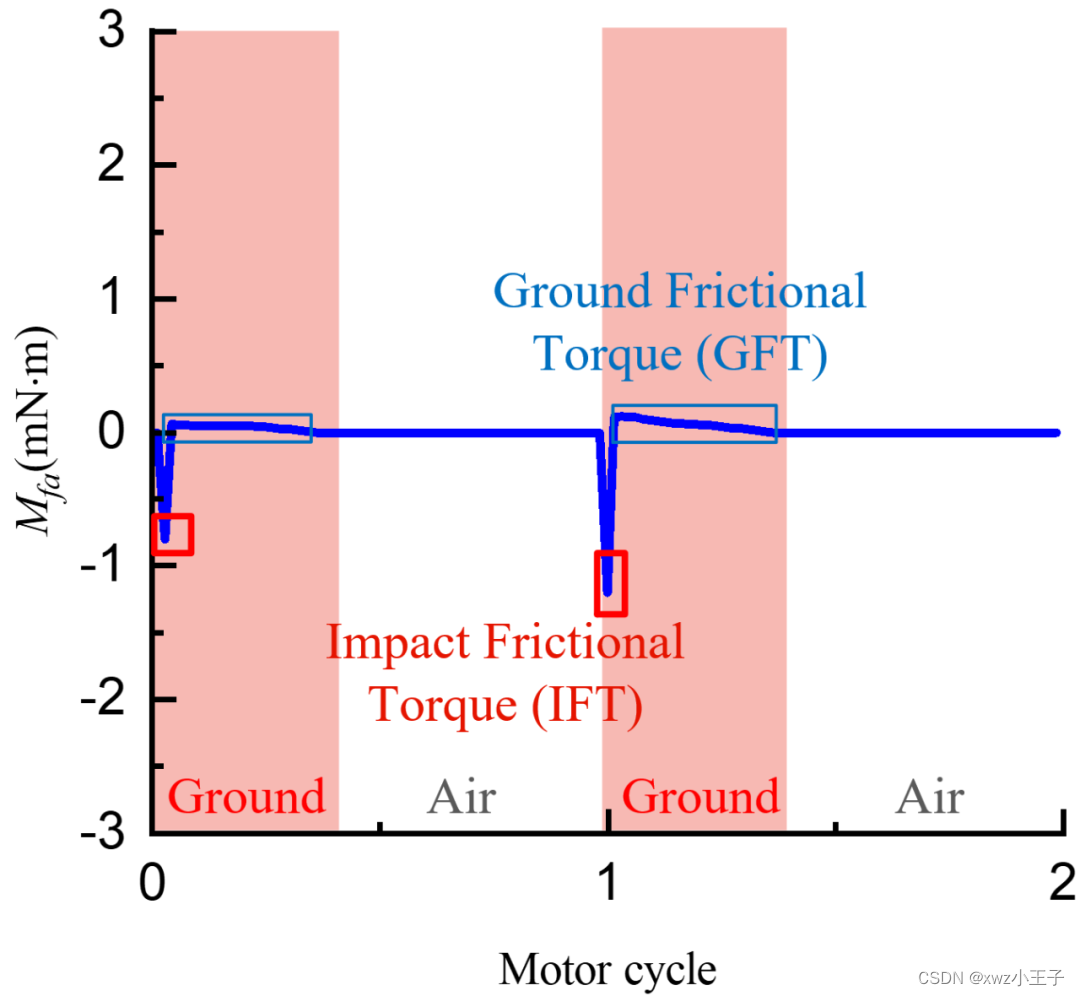
腿A从空中落地瞬间会带来冲击力正压力,并带来额外的冲击摩擦力和冲击摩擦力矩(Impact Frictional Torque, IFT),此外,腿A接触地面期间会受到地面摩擦力和地面摩擦力矩(Ground Frictional Torque, GFT),摩擦力(fAy)的方向与腿A的速度(vAy)方向相反,进而可得摩擦力矩的方向。图A中,电机转速为 782rad/s,由电机转速计算得出图示中的腿A触地时序,在落地瞬间(灰色区域与红色区域交界处),由于腿A的速度具有-y分量,可知 IFT 为负。而当电机转速为 877rad/s 时,腿A的落地时序改变,导致机器人在两个电机周期内分别具有负向和正向的 IFT。
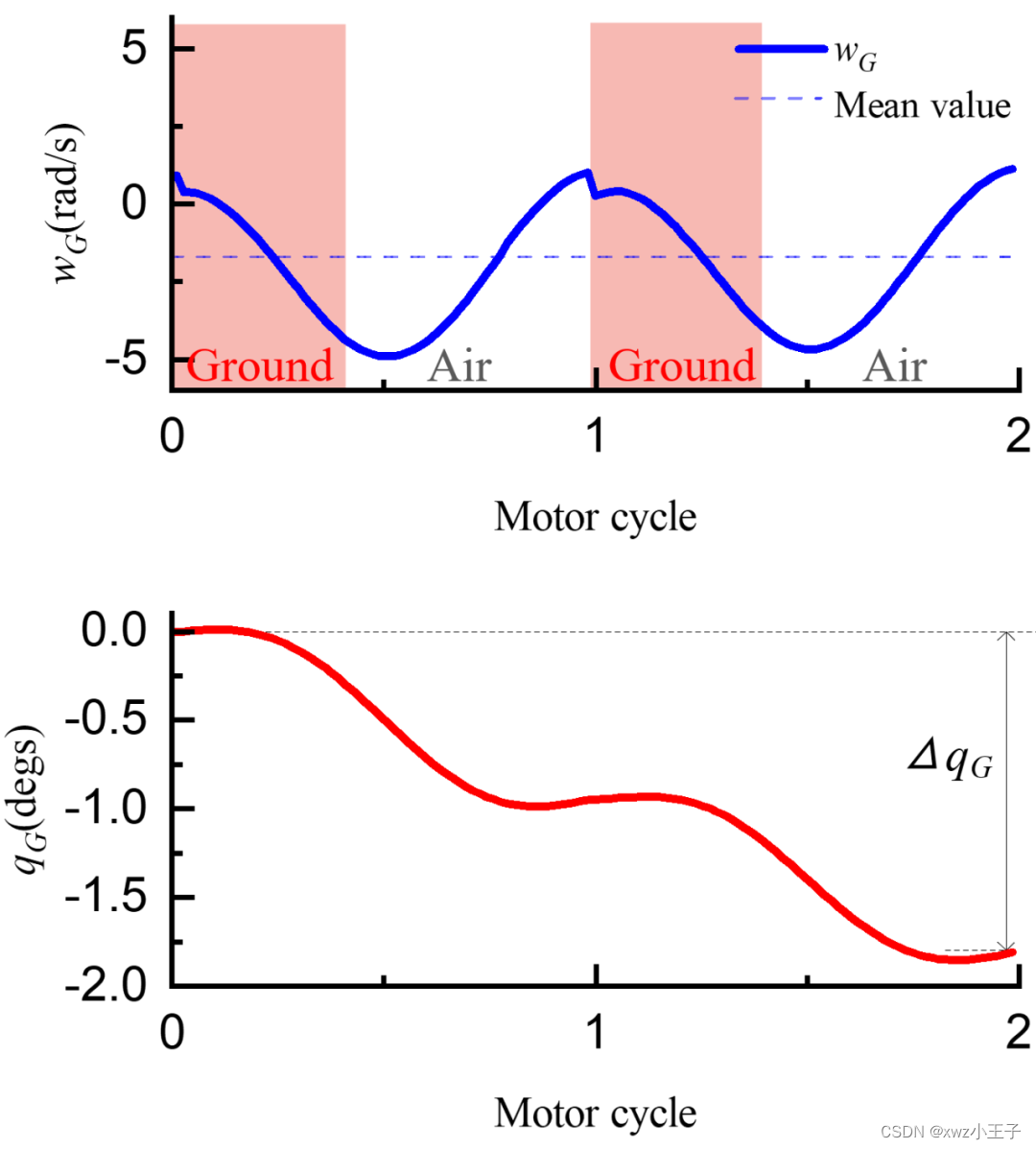
注意,机器人的受力状态影响其速度和角速度,而运动状态也反过来影响其所受摩擦力方向,在稳定运动时,受力状态和运动状态会达到一个稳态。当达到稳态时,机器人的角速度和角度曲线如下图所示,每一运动周期后,机器人的微观角速度不变,但有一个微小的角度变量。因此,在叠加了多个运动周期后,即从宏观上看,机器人沿着某个方向匀速转动。
为进一步解释ERDMT,引入第一个边界条件:由于机器人呈现严格周期性稳定运动,即机器人在每一个运动周期内所受的合力,合力矩均为零。因此,在不同的电机转速下,GFT 永远会抵消 IFT。然而某时刻的地面摩擦力由正压力决定摩擦力矩大小,由腿A运动方向决定摩擦力矩方向,为了达到稳态,机器人会“智能”地自动调整腿A在触地瞬间的纵轴运动方向,腿A的纵轴运动方向大部分由机身角速度决定,即机身角速度曲线会自动调节直至稳态。
此时引入第二个边界条件:由于机器人受电机的无阻尼受迫振动,所以机器人机身角速度的相位由电机相位决定(相差为恒定的 90°),即机身角速度曲线无法横向移动,只能纵向移动。最终,当电机角速度从较小切换至较大时,机身角速度曲线向上移动直至机器人达到稳态,即宏观平均角速度增大,这期间就会经历机器人逆时针-直行-顺时针旋转的奇妙现象,如下图所示。另外,若电机角速度过小,则驱动力过小无法跳动;反之角速度过大时会导致不稳定运动。
基于最新发现的ERDMT驱动原理,团队研制出了一款仅1.2 g 的微型爬行机器人:GASR,其在机械结构、驱动器配置和激励源方面的简单性,方便其被大批量复制。稳定和精确的运动使得GASR在没有反馈控制的情况下也能够有效地执行任务。总之,ERDMT技术为爬行机器人的驱动原理提供了一个通用的、有效的新途径。