硬件存储管理
1.1.初识硬盘
机械 HDD----便宜---这个,企业中更多 固态 SSD----快
SSD的优势
SSD采用电子存储介质进行数据存储和读取的一种技术,突破了传统机械硬盘的性能瓶颈, 拥有极高的存储性能,被认为是存储技术发展的新星。
与传统硬盘相比,SSD固态电子盘具有以下优点:
第一,SSD不需要机械结构,完全的半导体化,不存在数据查找时间、延迟时间和磁盘寻道时间,数据存取速度快。 第二,SSD全部采用闪存芯片,经久耐用,防震抗摔,即使发生与硬物碰撞,数据丢失的可能性也能够降到最小。 第三,得益于无机械部件及闪存芯片,SSD没有任何噪音,功耗低。 第四,质量轻,比常规1.8英寸硬盘重量轻20-30克,使得便携设备搭载多块SSD成为可能。同时因其完全半导体化 无结构限制,可根据实际情况设计成各种不同接口、形状的特殊电子硬盘。
硬盘设备命名
物理硬盘: /dev/sd[a-z] KVM虚拟化: /dev/vd[a-z](半虚拟化驱动) /dev/sd[a-z](全虚拟化驱动)
HP服务器硬盘
/dev/cciss/c0d0p1 //c0第一个控制器, d0第一块磁盘, p1分区1 /dev/cciss/c0d0p2 //c0第一个控制器, d0第一块磁盘, p2分区2
从存储连接方式
本地存储 例如DellR730本地磁盘 外部存储 scsi线 sata线 sas线 网络存储 以太网络(iscsi, glusterFS,ceph) 分布式---oss(阿里)cos(腾讯)
1.2从磁盘分区方式区分
MBR (MSDOS根据分区表来分区的,又叫做主引导扇区) <2TB 分区工具:fdisk 一共可以分14个分区(4个主分区,扩展分区,逻辑分区) 例如: 3主 + 1扩展(n逻辑) MBR 小于2TB的可以。 一块硬盘最多分4个主分区。
GPT >2TB和<2TB 分区工具:gdisk(parted---rhel6) 一共可以分128个主分区 GPT分区表的每个分区的最大容量是18EB GPT大于小于2TB都可以。 #注意:从MBR转到GPT,或从GPT转换到MBR会导致数据全部丢失!
二.基本分区
首先需要先给虚拟机添加磁盘
[root@localhost ~]# ll /dev/sd* brw-rw----. 1 root disk 8, 0 Nov 7 23:15 /dev/sda brw-rw----. 1 root disk 8, 1 Nov 7 23:15 /dev/sda1 brw-rw----. 1 root disk 8, 2 Nov 7 23:15 /dev/sda2 brw-rw----. 1 root disk 8, 16 Nov 7 23:15 /dev/sdb brw-rw----. 1 root disk 8, 32 Nov 7 23:15 /dev/sdc [root@localhost ~]# lsblk #查看磁盘设备 NAME MAJ:MIN RM SIZE RO TYPE MOUNTPOINT sda 8:0 0 20G 0 disk ├─sda1 8:1 0 1G 0 part /boot └─sda2 8:2 0 19G 0 part ├─centos-root 253:0 0 17G 0 lvm /└─centos-swap 253:1 0 2G 0 lvm [SWAP] sdb 8:16 0 10G 0 disk sdc 8:32 0 8G 0 disk
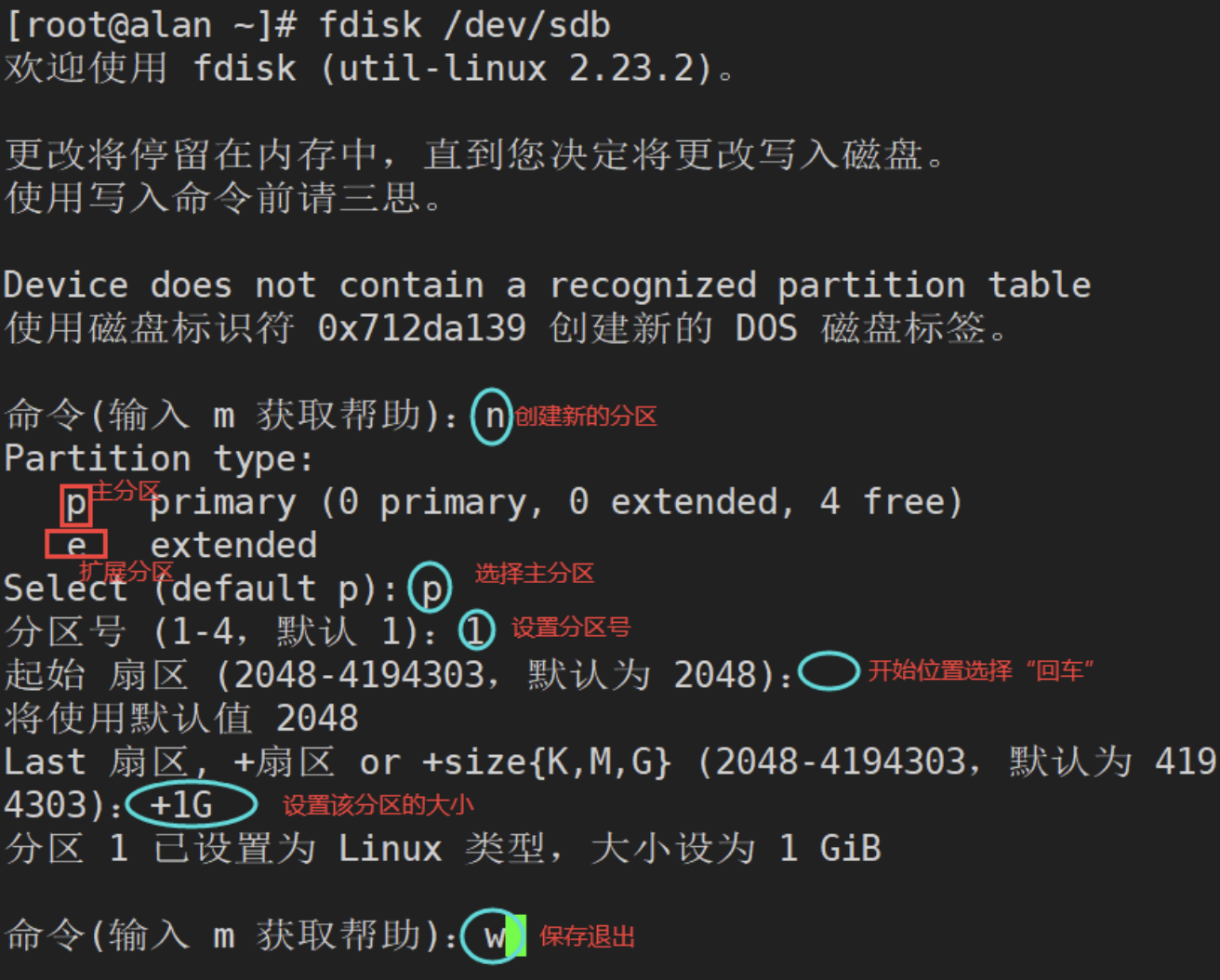
2.1.fdisk
MBR 14个分区(4个主分区,扩展分区,逻辑分区)
[root@localhost ~]# fdisk -l /dev/sdb #查看磁盘分区信息
# lsblk 查看分区结果 【如果分区后无法发现分区结果,请刷新分区表后再次查看】 # partprobe /dev/sdb
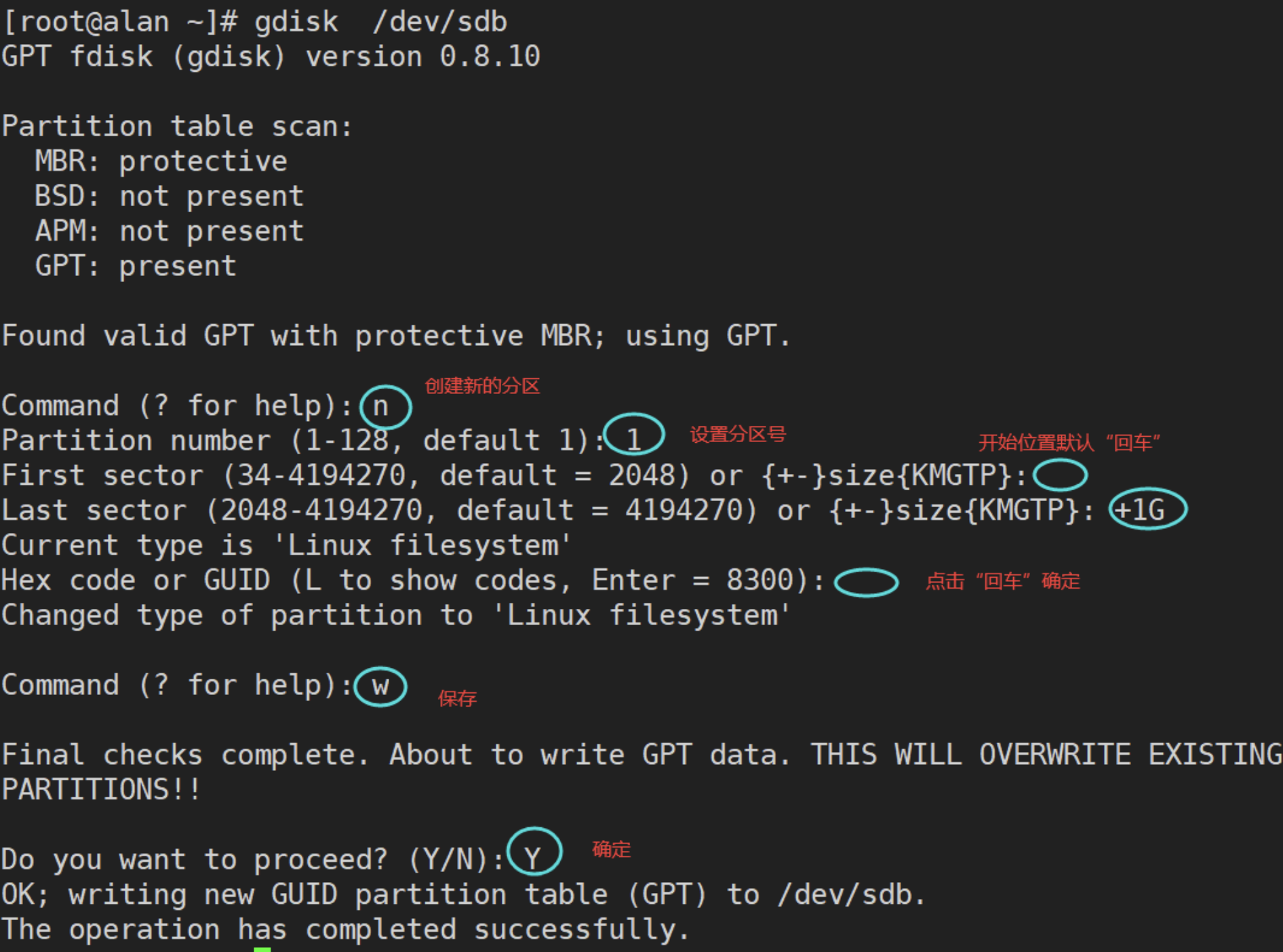
2.2 gdisk
GPT 128个主分区
1.创建分区
[root@localhost ~]# yum -y install gdisk #安装分区工具 [root@localhost ~]# gdisk -l /dev/sdb [root@localhost ~]# gdisk /dev/sdb
2.创建文件系统(格式化)centos7默认使用xfs
[root@localhost ~]# mkfs.ext4 /dev/sdb1 #格式化成ext4格式的文件系统 [root@localhost ~]# mkfs.xfs /dev/sdc2 #格式化成xfs格式的文件系统
3.挂载mount使用
[root@localhost ~]# mkdir /mnt/disk1 #创建挂载目录 [root@localhost ~]# mkdir /mnt/disks #创建挂载目录 [root@localhost ~]# mount -o rw /dev/sdb1 /mnt/disk1/ #-o 指定读写权限(ro只读,rx读写) mount参数: -o 指定读写权限 -a 需要定义(/etc/fstab)执行-a才会自动挂载 [root@localhost ~]# mount /dev/sdc2 /mnt/disks/
查看磁盘挂载与磁盘使用空间
[root@localhost ~]# df -Th Filesystem Type Size Used Avail Use% Mounted on /dev/mapper/centos-root xfs 17G 1.2G 16G 7% / devtmpfs devtmpfs 982M 0 982M 0% /dev tmpfs tmpfs 993M 0 993M 0% /dev/shm tmpfs tmpfs 993M 8.7M 984M 1% /run tmpfs tmpfs 993M 0 993M 0% /sys/fs/cgroup /dev/sda1 xfs 1014M 125M 890M 13% /boot tmpfs tmpfs 199M 0 199M 0% /run/user/0 /dev/sdb1 ext4 283M 2.1M 262M 1% /mnt/disk1 /dev/sdc2 xfs 197M 11M 187M 6% /mnt/disks 参数解释: -T 打印文件系统类型 -h 人性化显示,磁盘空间大小
取消挂载
[root@localhost ~]# umount /mnt/disks/ [root@localhost ~]# umount -l /mnt/disk1/ #强行卸载,即使目录有资源被进程占用,也可以卸载
三、fstab开机自动挂载
3.1./etc/fstab文件实现开机的时候自动挂载
磁盘id /data(挂载路径)
[root@localhost ~]# blkid /dev/sdb1 #查看uuid和文件系统类型 /dev/sdb1: UUID="d1916638-bd0a-4474-8051-f788116a3a92" TYPE="ext4" [root@localhost ~]# vim /etc/fstab 参数解释: 第1列:挂载设备 (1)/dev/sda5 (2)UUID=设备的uuid rhel6/7的默认写法 同一台机器内唯一的一个设备标识 第2列:挂载点 第3列:文件系统类型 第4列:文件系统属性 第5列:是否对文件系统进行磁带备份:0 不备份 第6列:是否检查文件系统:0 不检查

[root@localhost ~]# mount -a #自动挂载
[root@localhost ~]# vim /etc/fstab /dev/sdc2 /mnt/disks xfs defaults 0 0 [root@localhost ~]# mount -a
3.2/etc/rc.d/rc.local开机自动挂载
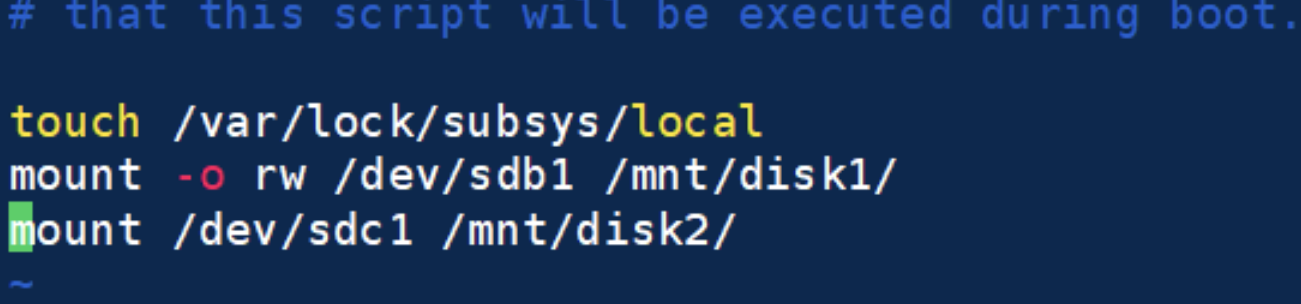
这个配置文件会在用户登陆之前读取,这个文件中写入了什么命令,在每次系统启动时都会执行一次。也就是说,如果有任何需要在系统启动时运行的工作,则只需写入 /etc/rc.d/rc.local 配置文件即可
[root@localhost ~]# vim /etc/rc.d/rc.local #将挂载命令直接写到文件中
[root@localhost ~]# chmod +x /etc/rc.d/rc.local #添加执行权限 [root@localhost ~]# reboot
重启后会发现硬盘已经实现永久挂载