首先几个四元数相乘是几个旋转动作叠加
其次构造四元数方法osg::Quat quat(float radians, const Vec3f& axis),其中radians是旋转弧度, 后面的axis是旋转轴向量;
osg::Quat rotation(osg::Quat(roll,osg::Vec3(0.0,1.0,0.0))*osg::Quat(-(yaw+osg::inDegrees(90.0f)),osg::Vec3(0.0,0.0,1.0)));
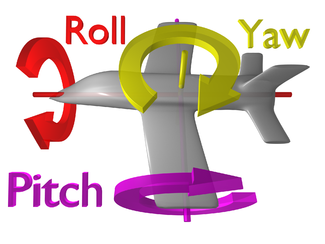
其中的旋转分量, x轴是俯仰(pitch), y轴是横滚(roll), z轴是航向角度(yaw),.
旋转表示:
四元数和旋转矩阵之间转换代码:
#include<iostream>
#include<cmath>
using namespace std;
typedef double ValType;
struct Quat;
struct Matrix;
struct Quat {
ValType _v[4];//x, y, z, w
/// Length of the quaternion = sqrt( vec . vec )
ValType length() const
{
return sqrt( _v[0]*_v[0] + _v[1]*_v[1] + _v[2]*_v[2] + _v[3]*_v[3]);
}
/// Length of the quaternion = vec . vec
ValType length2() const
{
return _v[0]*_v[0] + _v[1]*_v[1] + _v[2]*_v[2] + _v[3]*_v[3];
}
};
struct Matrix {
ValType _mat[3][3];
};
#define QX q._v[0]
#define QY q._v[1]
#define QZ q._v[2]
#define QW q._v[3]
void Quat2Matrix(const Quat& q, Matrix& m)
{
double length2 = q.length2();
if (fabs(length2) <= std::numeric_limits<double>::min())
{
m._mat[0][0] = 0.0; m._mat[1][0] = 0.0; m._mat[2][0] = 0.0;
m._mat[0][1] = 0.0; m._mat[1][1] = 0.0; m._mat[2][1] = 0.0;
m._mat[0][2] = 0.0; m._mat[1][2] = 0.0; m._mat[2][2] = 0.0;
}
else
{
double rlength2;
// normalize quat if required.
// We can avoid the expensive sqrt in this case since all 'coefficients' below are products of two q components.
// That is a square of a square root, so it is possible to avoid that
if (length2 != 1.0)
{
rlength2 = 2.0/length2;
}
else
{
rlength2 = 2.0;
}
// Source: Gamasutra, Rotating Objects Using Quaternions
//
//http://www.gamasutra.com/features/19980703/quaternions_01.htm
double wx, wy, wz, xx, yy, yz, xy, xz, zz, x2, y2, z2;
// calculate coefficients
x2 = rlength2*QX;
y2 = rlength2*QY;
z2 = rlength2*QZ;
xx = QX * x2;
xy = QX * y2;
xz = QX * z2;
yy = QY * y2;
yz = QY * z2;
zz = QZ * z2;
wx = QW * x2;
wy = QW * y2;
wz = QW * z2;
// Note. Gamasutra gets the matrix assignments inverted, resulting
// in left-handed rotations, which is contrary to OpenGL and OSG's
// methodology. The matrix assignment has been altered in the next
// few lines of code to do the right thing.
// Don Burns - Oct 13, 2001
m._mat[0][0] = 1.0 - (yy + zz);
m._mat[1][0] = xy - wz;
m._mat[2][0] = xz + wy;
m._mat[0][1] = xy + wz;
m._mat[1][1] = 1.0 - (xx + zz);
m._mat[2][1] = yz - wx;
m._mat[0][2] = xz - wy;
m._mat[1][2] = yz + wx;
m._mat[2][2] = 1.0 - (xx + yy);
}
}
void Matrix2Quat(const Matrix& m, Quat& q)
{
ValType s;
ValType tq[4];
int i, j;
// Use tq to store the largest trace
tq[0] = 1 + m._mat[0][0]+m._mat[1][1]+m._mat[2][2];
tq[1] = 1 + m._mat[0][0]-m._mat[1][1]-m._mat[2][2];
tq[2] = 1 - m._mat[0][0]+m._mat[1][1]-m._mat[2][2];
tq[3] = 1 - m._mat[0][0]-m._mat[1][1]+m._mat[2][2];
// Find the maximum (could also use stacked if's later)
j = 0;
for(i=1;i<4;i++) j = (tq[i]>tq[j])? i : j;
// check the diagonal
if (j==0)
{
/* perform instant calculation */
QW = tq[0];
QX = m._mat[1][2]-m._mat[2][1];
QY = m._mat[2][0]-m._mat[0][2];
QZ = m._mat[0][1]-m._mat[1][0];
}
else if (j==1)
{
QW = m._mat[1][2]-m._mat[2][1];
QX = tq[1];
QY = m._mat[0][1]+m._mat[1][0];
QZ = m._mat[2][0]+m._mat[0][2];
}
else if (j==2)
{
QW = m._mat[2][0]-m._mat[0][2];
QX = m._mat[0][1]+m._mat[1][0];
QY = tq[2];
QZ = m._mat[1][2]+m._mat[2][1];
}
else /* if (j==3) */
{
QW = m._mat[0][1]-m._mat[1][0];
QX = m._mat[2][0]+m._mat[0][2];
QY = m._mat[1][2]+m._mat[2][1];
QZ = tq[3];
}
s = sqrt(0.25/tq[j]);
QW *= s;
QX *= s;
QY *= s;
QZ *= s;
}
void printMatrix(const Matrix& r, string name)
{
cout<<"RotMat "<<name<<" = "<<endl;
cout<<"\t"<<r._mat[0][0]<<" "<<r._mat[0][1]<<" "<<r._mat[0][2]<<endl;
cout<<"\t"<<r._mat[1][0]<<" "<<r._mat[1][1]<<" "<<r._mat[1][2]<<endl;
cout<<"\t"<<r._mat[2][0]<<" "<<r._mat[2][1]<<" "<<r._mat[2][2]<<endl;
cout<<endl;
}
void printQuat(const Quat& q, string name)
{
cout<<"Quat "<<name<<" = "<<endl;
cout<<"\t"<<q._v[0]<<" "<<q._v[1]<<" "<<q._v[2]<<" "<<q._v[3]<<endl;
cout<<endl;
}
int main()
{
ValType phi, omiga, kappa;
phi = 1.32148229302237 ; omiga = 0.626224465189316 ; kappa = -1.4092143985971;
ValType a1,a2,a3,b1,b2,b3,c1,c2,c3;
a1 = cos(phi)*cos(kappa) - sin(phi)*sin(omiga)*sin(kappa);
a2 = -cos(phi)*sin(kappa) - sin(phi)*sin(omiga)*cos(kappa);
a3 = -sin(phi)*cos(omiga);
b1 = cos(omiga)*sin(kappa);
b2 = cos(omiga)*cos(kappa);
b3 = -sin(omiga);
c1 = sin(phi)*cos(kappa) + cos(phi)*sin(omiga)*sin(kappa);
c2 = -sin(phi)*sin(kappa) + cos(phi)*sin(omiga)*cos(kappa);
c3 = cos(phi)*cos(omiga);
Matrix r;
r._mat[0][0] = a1;
r._mat[0][1] = a2;
r._mat[0][2] = a3;
r._mat[1][0] = b1;
r._mat[1][1] = b2;
r._mat[1][2] = b3;
r._mat[2][0] = c1;
r._mat[2][1] = c2;
r._mat[2][2] = c3;
printMatrix(r, "r");
//
Quat q;
Matrix2Quat(r, q);
printQuat(q, "q");
Matrix _r;
Quat2Matrix(q, _r);
printMatrix(_r, "_r");
system("pause");
return 0;
}
源文档 <http://hi.baidu.com/simbaforrest/blog/item/328d7fb4a4c0ac7a8ad4b24b.html>