关于穿越机FPV视频果冻效应的讨论
关于穿越机FPV视频果冻效应的讨论
- 1. 名词定义
- 2. 摄像原理
- 2.1 快门分类
- 2.2 卷帘拍摄
- 3. 产生原因
- 4. 解决方法
- 4.1 振动出处
- 4.2 软件方法(辅助作用)
- 4.3 硬件方法(直接办法)
- 5. F450试验机遇到的问题
- 5.1 现象
- 5.2 测试
- 5.3 减震改善
- 5.4 其他改善
- 5.5 初步结论
- 5.6 改进方向
- 6. 总结
- 7. 参考资料
这里讨论下穿越机FPV视频果冻效应的问题,看了好多B站的视频,从逻辑上讲,主要的问题来自硬件。
【1】萌新穿越机改pid出现抖动?
【2】自带高清果冻还是很厉害
【3】达尔文花飞练习
【4】399达尔文套机1公里小远航第二次
【5】达尔文FPV,室内室外通吃,稳飞10分钟续航
【6】穿越机果冻的五大硬件原因 -TimmyRC 5 Reasons Your Setup Has Jello
1. 名词定义
果冻效应,指在生产生活中像果冻一样产生的变形和颜色变化。
2. 摄像原理
在我们谈视频产生果冻效应之前, 先了解一下数码相机的摄像原理。
2.1 快门分类
首先,数码相机的重要部件就是快门,分为:Global shutter and Rolling shutter(全局快门 与 卷帘快门)。
-
使用CMOS传感器的相机多数使用卷帘快门,它是通过图像传感器逐行曝光的方式实现的。在曝光开始的时候,图像传感器逐行扫描逐行进行曝光,直至所有像素点都被曝光。当然,所有的动作在极短的时间内完成,一般不会对拍摄造成影响。
-
使用CCD传感器的相机多数采用全局快门,因此一帧所有像素是在同一时间段内进行曝光。相较于卷帘快门,具有拍摄高速物体更优的性能(不易模糊)。

2.2 卷帘拍摄

3. 产生原因
果冻的形成是摄影机本身的特性决定的,当拍摄物体相对于相机高速运动或快速振动时,用卷帘快门方式拍摄,逐行扫描速度不够,拍摄结果就可能出现“倾斜”、“摇摆不定”或“部分曝光”等情况。这种卷帘快门方式拍摄出现的现象,就定义为果冻效应。
注:通常来说全局快门不太可能出现果冻,但是如果曝光时间过程,拍摄高速运动或者在振动的情况下拍摄,会导致图像模糊。
4. 解决方法
对于FPV视频来说,要解决CMOS/CCD传感器卷帘快门方式拍摄下果冻效应的就是:硬件减振(避免摄像头卷帘快门工作方式下的“倾斜”、“摇摆不定”或“部分曝光”等情况)。
4.1 振动出处
- 机架问题:炸机(断裂),螺丝松动
- 动平衡问题:炸机(桨叶损坏,电机轴歪)
- 飞控减振: 飞控晃动,飞控振动
- 飞控受力:电线压迫飞控、器件压迫飞控
- 设备共振:电机 + 桨叶 + 机架
- 操作手抖
注:关于操作问题,这个首先需要大家根据自己的情况排除,也可以通过日志数据看RC stick的数据来确认。
4.2 软件方法(辅助作用)
- 【摄像头】曝光时间调小(解决果冻,越小越好)
暗场景,曝光时间不够可能比较暗,需要根据实际使用情况权衡。
- 【飞控】陀螺仪滤波(避免飞控由于振动数据导致的误动作:软件调整平衡飞机)
为什么说辅助的原因就是这里,不管怎么软件滤波,振动始终在物理世界存在。除非是PID非常不合理导致的问题。
4.3 硬件方法(直接办法)
- 【机架】拧紧螺丝
金属疲劳,起降/飞行振动 螺丝松动导致机臂机身松动。
- 【机架】更换机架
由于炸机导致机臂开列或者某些部件松动固定不牢,导致飞行期间振动。
也可能是机架本身比较软 或者 与电机、桨叶产生共振。
- 【动平衡】更换桨叶
桨叶损坏,动平衡被破坏,有专门的工具可以测试,如果损坏需要立即更换(通常炸机的桨叶,有缺损,有弯折,需要立即更换)。
- 【动平衡】更换电机 或 轴承
炸机 或 长时间使用导致轴承磨损或者弯曲,可以使用测试软件单独电机(脱桨)测试稳定性。
- 【飞控减振】增加飞控减振橡胶垫 或者 橡胶螺柱
飞控板上SMT有陀螺仪芯片,因此板子如果硬连接在机架上,振动能够非常轻易的影响陀螺仪,干扰数据。可以通过减振脚垫来物理屏蔽,长时间橡胶如有损坏,请更换。
- 【飞控受力】重新整理飞控板子周边,电线不要顶住机架,电解电容等大型外挂器件不要接触飞控板,进而影响陀螺仪
为了走线美观,电机线可能会贴着机架,绕过机架上的铝管,某些AIO的飞控板会直接焊接电机线,从而传递到振动。
电池电源外接的电解电容如果碰到飞控板也会带来振动,尽量保证飞控板仅仅是减振螺柱固定到飞控机架上即可。
- 【设备共振】更换部件(桨叶、电机、机架)使得不产生共振
这种问题是最头疼的,通常来说桨叶的更换最为方便,多选择其他品牌或者好的口碑的桨叶来进行测试。
使用前面的电机动平衡测试方法来确保电机本身没有问题。
- 【摄像头】更换全局快门摄像头
从硬件的角度来说更换CCD(通常全局快门)是一个方法。但是从实际情况看,CMOS摄像头在比较好的硬件减振情况下,也是不应该有果冻的。
5. F450试验机遇到的问题
5.1 现象
飞行过程发现,地面呈现水波纹,高楼有扭动,视频自arm以后,有明显的振动。
5.2 测试
- 【无果冻】静止(电机不转):模拟信号雪花点
- 【无果冻】运动(电机不转):模拟信号雪花点,大FOV视频畸变(正常)
- 【无果冻】静止(电机带桨叶转):有明显上线振动(抖动)
- 【有果冻】运动(电机带桨叶转):果冻效应明显
- 【有果冻】悬停(第三人称,飞机悬停稳定):第一人称FPV视角,有水泼纹(大楼图像晃动)
- 【有果冻】离地越高,地面水波纹效应越明显
- 【有果冻】新桨叶问题依旧
老桨叶(白色,最早视频模糊,但是果冻相较好不少) 新桨叶(红色,果冻更多更强),历史视频显示,新桨叶果冻效果厉害
- 视频显示机臂上的天线振动厉害(怀疑桨叶 + 机架,引起振动)
某次试飞,将Rx天线正好放在了FPV摄像头拍摄区域,发现明显的振动。
5.3 减震改善
- 【无效】飞控板增加减振胶垫
其实飞控板的陀螺仪上是有泡沫垫与飞控板连接的,有避震效果)
- 【无效】电机增加减震垫
增加一定的软连接来减少电机和桨叶带来的振动。
- 【无效】更换新桨叶(新购买)
问题依然存在,稍有改善
- 【无效】电机振动:测试每个电机无轴承问题
电机(不带桨叶),平放桌上,单独控制每个电机独立转动,无明显振动。
- 【无效】摄像头增加软连接
摄像头减震:1) 棉花+单股电线软线,防震软连接;2) 3M双面胶垫底+软胶带固定
5.4 其他改善
- 使用PDB分电板上的12V/5V(独立)供图传和摄像头,并增加2200uF + 0.01uF滤波
期望减少电源干扰雪花点,横波纹等。
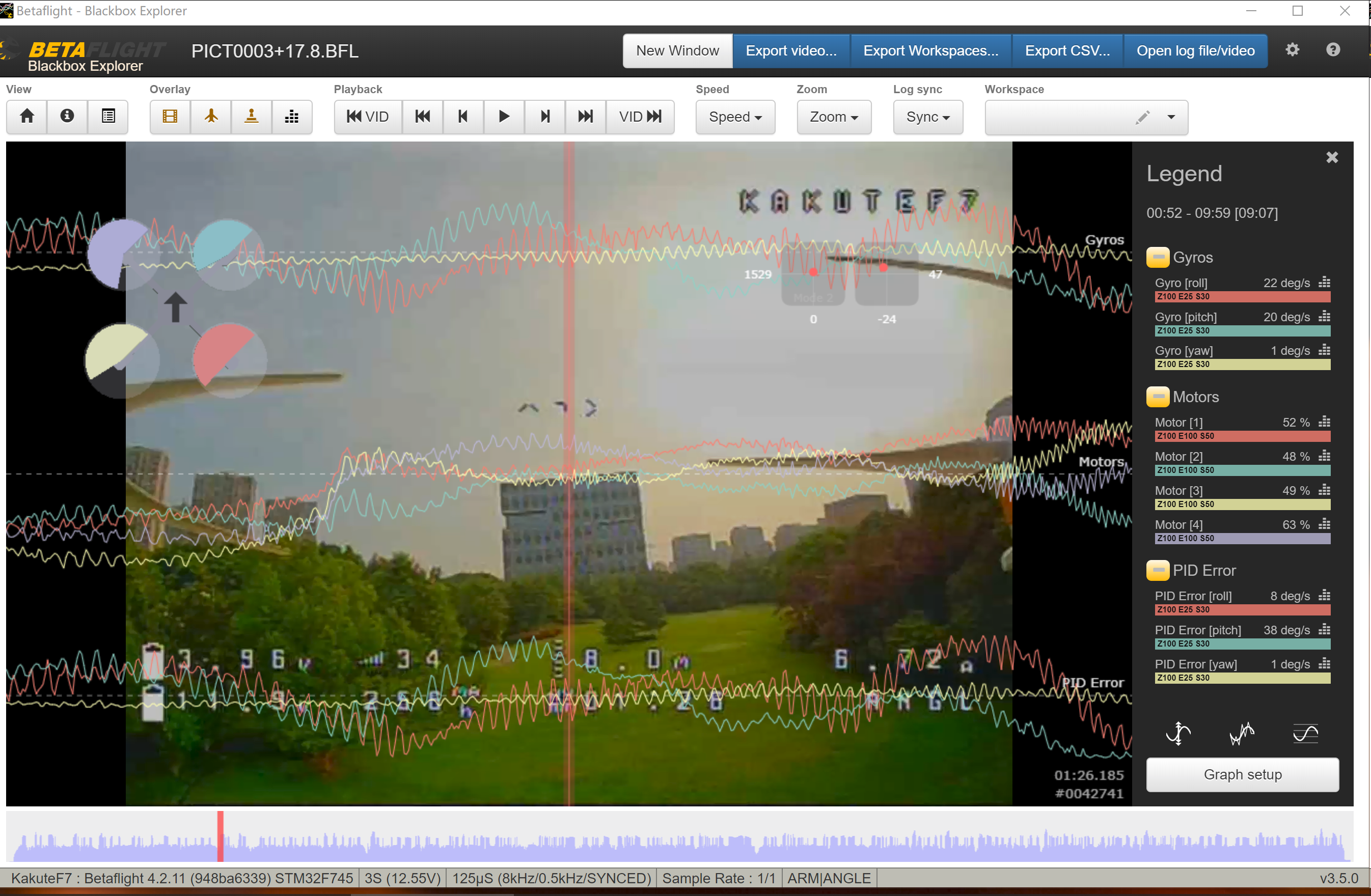
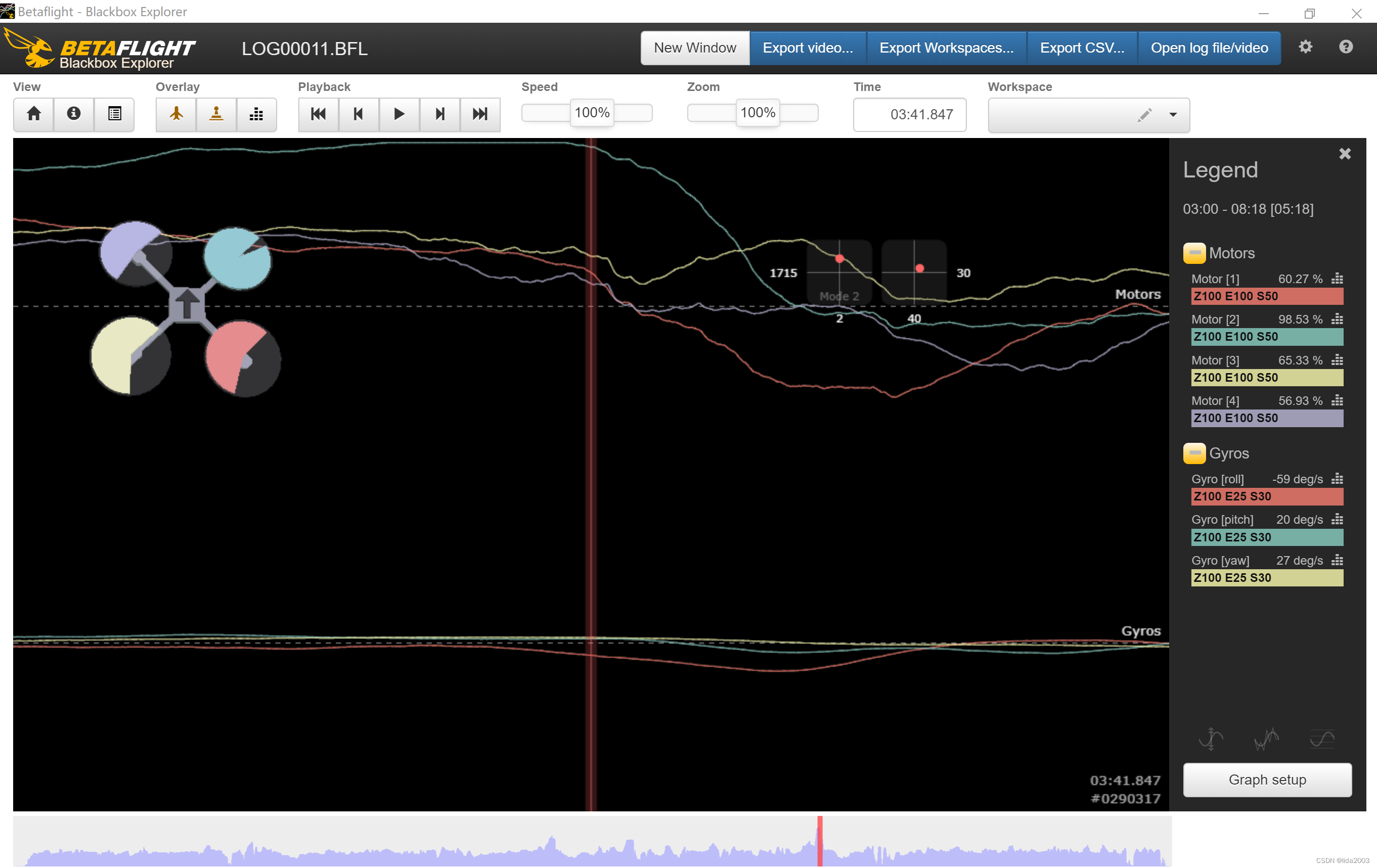
- 陀螺仪软件滤波(日志数据显示,低频信号,数据完美)
期望减少飞控由于干扰数据的误动作,收效甚微。
- 曝光时间未做调整
仍然采用自动(全场景几乎都有果冻,所以没做过多测试)
- 增加摄像头屏蔽(稀薄接电池地)
怀疑480Hz PWM控制线或者飞控电磁干扰,屏蔽CMOS模拟摄像头(屏蔽干扰,锡箔纸接GND) ,有一定效果,果冻效应依旧存在
5.5 初步结论
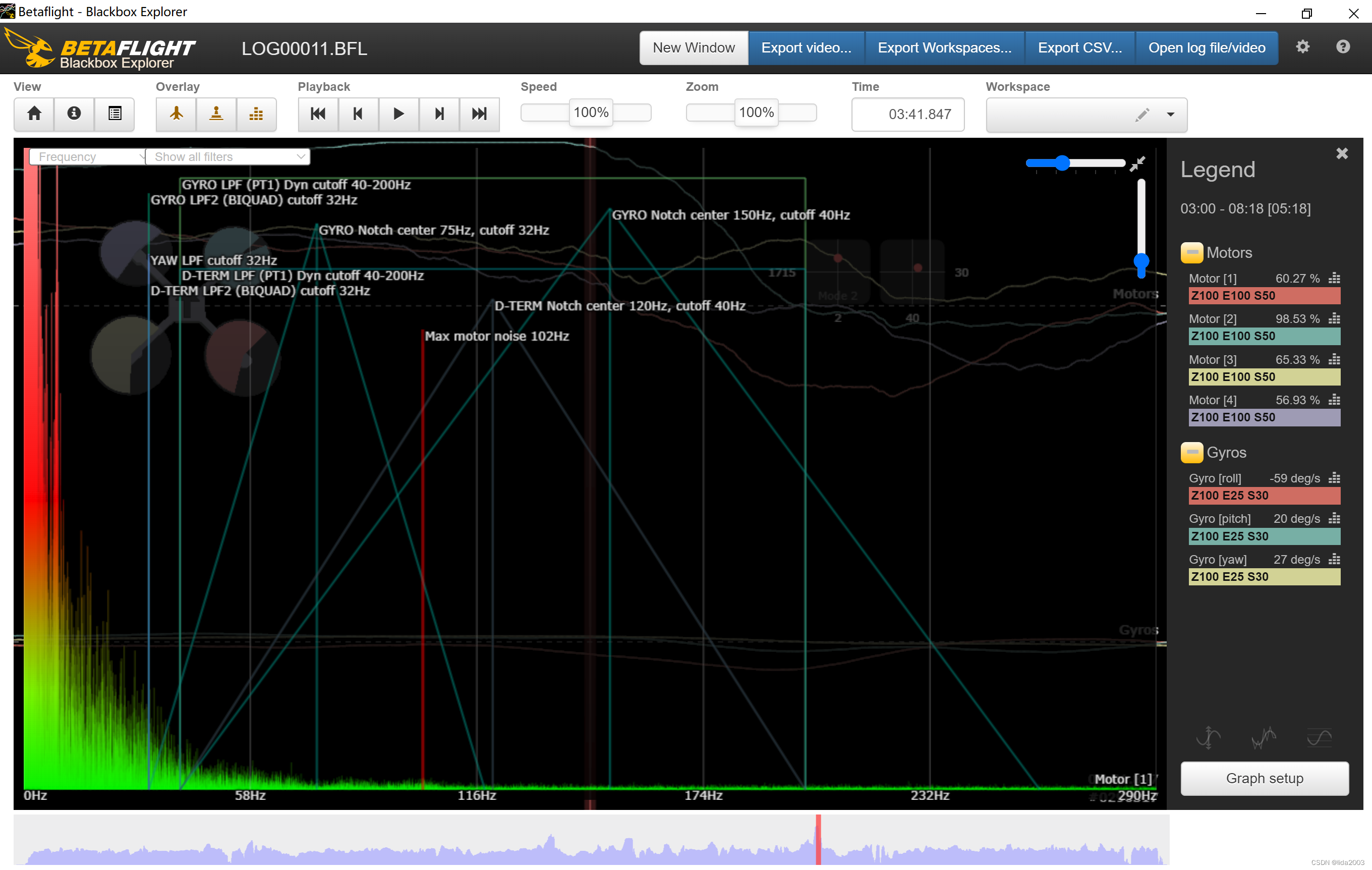
怀疑:电机910KV和桨叶带来的振动,与F450机架(软)共振,导致固定频率振动。
证据:滤波(干净)前日志显示锯齿状振动频率, 滤波后陀螺仪数据完美,且第三人称看飞机飞行稳定,但FPV视频果冻。
5.6 改进方向
- 更换更硬材质的机架(小机架,非廉价机架)
- 更换大KV值电机(高频小幅度振动)
- 电机与机架的TPU防震
- 保持飞控防震垫防震
6. 总结
PS:高人也请多多指点,评论留言,看看是否还有哪些可能与因素没有考虑到,万分感谢!
注:暂时保留该章节,待后续更新改进后的效果。
7. 参考资料
【1】果冻效应rolling shutter
【2】四轴飞控DIY集成FPV功能
【3】四轴飞控DIY简明步骤介绍