【从零开始一步步学习VSOA开发】发布订阅重连时同步
发布订阅重连时同步
概念
数据同步是指在数据发布与订阅场景中,当客户端因故障断开重连后,需要立即获取当前最新数据的需求。
如前面开发示例中的 axis_server 陀螺仪服务,若产生故障断开重连,则需要客户端上线后立即获取 /axis 的最新状态,以保证数据的一致性。通常情况下,客户端会在断开重连后,主动发起一次 RPC 请求以获取数据的最新状态,但如果需要获取的数据量较大,则会给代码编程带来更多的复杂性。此时,可以使用客户端机器人带有的自动数据同步接口进行处理。
程序源码
发布订阅重连时同步需要服务端和客户端都进行支持。服务端需要增加一个 RPC 服务,用于返回最后一次发布数据。客户端需要调用自动数据同步接口 vsoa_client_auto_consistent以便重连后能及时请求最新数据。
修改后的服务端源码如下,注意 RPC 服务的添加,同时为了测试效果明显,将发布周期由 1 秒改为了 10 秒。
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include "vsoa_platform.h"
#include "vsoa_server.h"#define MY_SERVER_ADDR "0.0.0.0"
#define MY_SERVER_PORT (4002)
#define MY_SERVER_NAME "{\"name\":\"axis_server\"}"
#define MY_SERVER_PASSWD "123456"#define AXIS_SER_BUF_LEN 100static int roll = 1, pitch = 1, yaw = 1;static void *publish_axis_thread (void *arg)
{vsoa_url_t url;vsoa_payload_t payload;vsoa_server_t *server = arg;char param[AXIS_SER_BUF_LEN + 1];url.url = "/axis";url.url_len = strlen(url.url);payload.data = NULL;payload.data_len = 0;payload.param = param;roll = 1;pitch = 1;yaw = 1;while (TRUE) {sleep(10);if (!vsoa_server_is_subscribed(server, &url)) {continue;}payload.param_len = snprintf(param, AXIS_SER_BUF_LEN,"{\"roll\": %d, \"pitch\": %d, \"yaw\": %d}",roll++, pitch++, yaw++);printf("publish:%s\n", param);vsoa_server_publish(server, &url, &payload);}return (NULL);
}static void command_axis (void *arg, vsoa_server_t *server, vsoa_cli_id_t cid,vsoa_header_t *vsoa_hdr, vsoa_url_t *url,vsoa_payload_t *payload)
{vsoa_payload_t send;char param[100];uint32_t seqno = vsoa_parser_get_seqno(vsoa_hdr);sprintf(param, "{\"roll\": %d, \"pitch\": %d, \"yaw\": %d}",roll, pitch, yaw);send.data = NULL;send.data_len = 0;send.param = param;send.param_len = strlen(send.param);vsoa_server_cli_reply(server, cid, 0, seqno, 0, &send);
}int main (int argc, char **argv)
{vsoa_server_t *server;/** 创建服务端*/server = vsoa_server_create(MY_SERVER_NAME);if (!server) {fprintf(stderr, "Can not create VSOA server!\n");return (-1);}/** 设置密码,设置为NULL,表示密码为空,客户端可以不输入密码*/vsoa_server_passwd(server, MY_SERVER_PASSWD);vsoa_url_t url;url.url = "/axis";url.url_len = strlen(url.url);vsoa_server_add_listener(server, &url, command_axis, NULL);/** 启动微服务*/struct sockaddr_in addr;bzero(&addr, sizeof(struct sockaddr_in));addr.sin_family = AF_INET;addr.sin_port = htons(MY_SERVER_PORT);addr.sin_addr.s_addr = inet_addr(MY_SERVER_ADDR);addr.sin_len = sizeof(struct sockaddr_in);if (!vsoa_server_start(server, (struct sockaddr *)&addr, sizeof(struct sockaddr_in))) {vsoa_server_close(server);fprintf(stderr, "Can not start VSOA server!\n");return (-1);}/** Create publish thread*/pthread_t pub_threadid;pthread_create(&pub_threadid, NULL, publish_axis_thread, server);/** 进入监听事件循环*/while (1) {int cnt;int max_fd;fd_set fds;struct timespec timeout = {1, 0 };FD_ZERO(&fds);max_fd = vsoa_server_fds(server, &fds);cnt = pselect(max_fd + 1, &fds, NULL, NULL, &timeout, NULL);if (cnt > 0) {vsoa_server_input_fds(server, &fds);}}return (0);
}修改后的客户端源码如下,注意第 31 行。
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/select.h>
#include "vsoa_client.h"
#include "vsoa_cliauto.h"#define MY_SERVER_PASSWD "123456"static void onmessage (void *arg, struct vsoa_client *client, vsoa_url_t *url, vsoa_payload_t *payload, bool quick)
{printf("subscribe message, url:%.*s, quick:%s\n",(int)url->url_len, url->url,quick ? "ture":"false");printf("subscribe message, param:%.*s, data:%.*s\n",(int)payload->param_len, payload->param,(int)payload->data_len, (char *)payload->data);
}int main (int argc, char **argv)
{vsoa_client_auto_t *cliauto;static char *sub_urls[] = { "/axis" };/** 创建客户端机器人*/cliauto = vsoa_client_auto_create(onmessage, NULL);vsoa_client_auto_consistent(cliauto, sub_urls, 1, 1000);/** 启动客户端机器人127.0.0.1:4001 vsoa://axis_server*/vsoa_client_auto_start(cliauto, "vsoa://axis_server", MY_SERVER_PASSWD, sub_urls, 1, 1000, 1000, 1000);while (true) {sleep(1);}
}执行效果
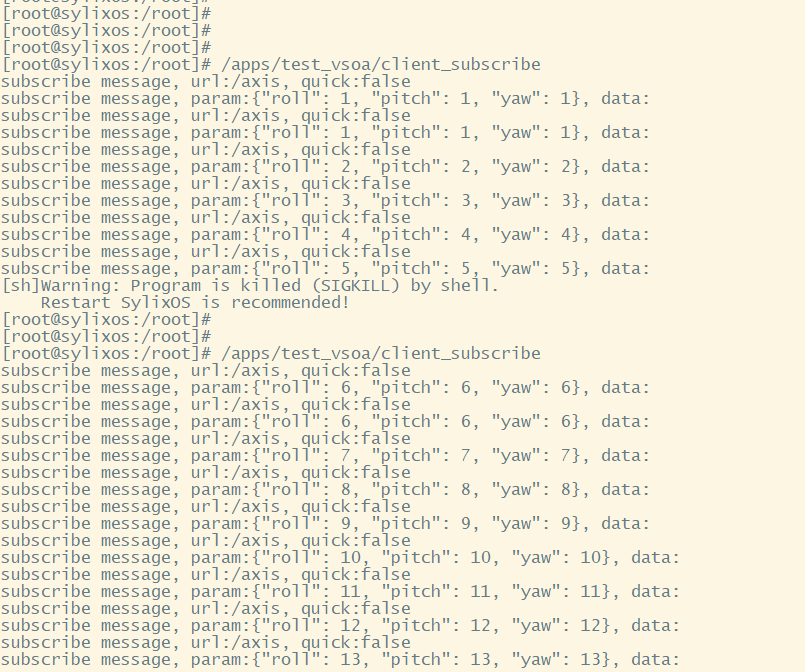
先启动服务端再启动客户端,在客户端刚收到某次发布消息后立即“ctrl+c”退出客户端并重新执行,这个过程不会超过 1 秒,案例约 10 秒后才能收到下一次发布消息,但因为同步功能的原因会立即得到一次数据。
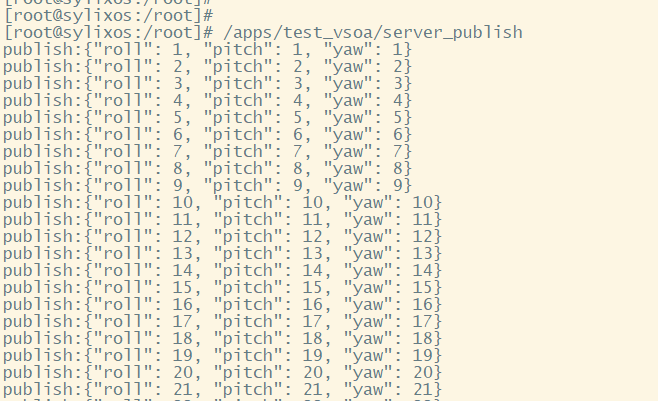
服务端执行效果:
客户端执行效果: