python计算机视觉——第四章 照相机模型与增强现实
4.1 针孔照相机模型
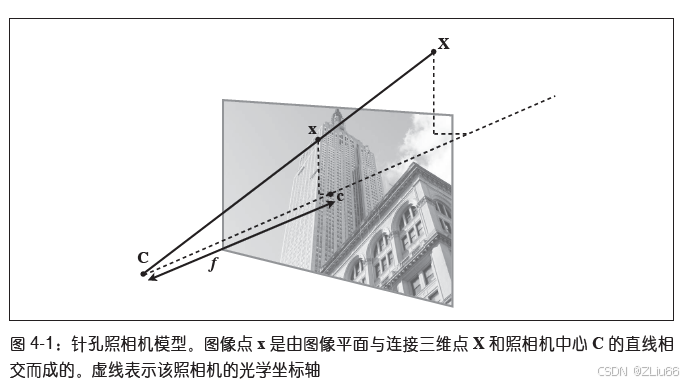
针孔照相机模型(有时称为射影照相机模型)是计算机视觉中广泛使用的照相机模型。对于大多数应用来说,针孔照相机模型简单,并且具有足够的精确度。这个名字来源于一种类似暗箱机的照相机。该照相机从一个小孔采集射到暗箱内部的光线。在针孔照相机模型中,在光线投影到图像平面之前,从唯一一个点经过,也就是照相机中心C。
由图像坐标轴和三维坐标系中的x 轴和y 轴对齐平行的假设,我们可以得出针孔照相机的投影性质。照相机的光学坐标轴和z 轴一致,该投影几何可以简化成相似三角形。在投影之前通过旋转和平移变换,对该坐标系加入三维点,会出现完整的投影变换。
在针孔照相机中,三维点X 投影为图像点x(两个点都是用齐次坐标表示的),如下所示:
\(\lambda\mathbf{x}=P\mathbf{X}\)
这里,3×4 的矩阵P 为照相机矩阵(或投影矩阵)。注意,在齐次坐标系中,三维点X 的坐标由4 个元素组成,X=[X, Y, Z, W]。这里的标量λ 是三维点的逆深度。如果我们打算在齐次坐标中将最后一个数值归一化为1,那么就会使用到它。
4.1.1 照相机矩阵
照相机矩阵可以分解为:
\(P=K[R|t]\)
其中,R 是描述照相机方向的旋转矩阵,t 是描述照相机中心位置的三维平移向量,内标定矩阵K 描述照相机的投影性质。
标定矩阵仅和照相机自身的情况相关,通常情况下可以写成:
\(K=\begin{bmatrix}\alpha f&s&c_x\\0&f&c_y\\0&0&1\end{bmatrix}\)
图像平面和照相机中心间的距离为焦距f。当像素数组在传感器上偏斜的时候,需要用到倾斜参数s。在大多数情况下,s 可以设置成0。也就是说:
\(K=\begin{bmatrix}f_x&0&c_x\\0&f_y&c_y\\0&0&1\end{bmatrix}\)
这里,我们使用了另外的记号\(f_x\)和\(f_y\),两者关系为\(f_{x}=af_{y}\)。
纵横比例参数α 是在像素元素非正方形的情况下使用的。通常情况下,我们可以默认设置α=1。经过这些假设,标定矩阵变为:
\(K=\begin{bmatrix}f&0&c_x\\0&f&c_y\\0&0&1\end{bmatrix}\)
除焦距之外,标定矩阵中剩余的唯一参数为光心(有时称主点)的坐标c=[cx,cy],也就是光线坐标轴和图像平面的交点。因为光心通常在图像的中心,并且图像的坐标是从左上角开始计算的,所以光心的坐标常接近于图像宽度和高度的一半。特别强调一点,在这个例子中,唯一未知的变量是焦距f。
4.1.2 三维点的投影
下面来创建照相机类,用来处理我们对照相机和投影建模所需要的全部操作:
from scipy import linalg
from pylab import *class Camera(object):""" 表示针孔照相机的类"""def __init__(self,P):""" 初始化 P = K[R|t] 照相机模型"""self.P = Pself.K = None # 标定矩阵self.R = None # 旋转self.t = None # 平移self.c = None # 照相机中心def project(self,X):""" X(4×n 的数组)的投影点,并且进行坐标归一化 """x = dot(self.P,X)for i in range(3):x[i] /= x[2]return x在这个例子中,我们将使用牛津多视图数据集中的“Model Housing”数据集,可以从http://www.robots.ox.ac.uk/~vgg/data/data-mview.html 下载。

4.1.3 照相机矩阵的分解
如果给定如方程(4.1.1)所示的照相机矩阵P,我们需要恢复内参数K 以及照相机的位置t 和姿势R。矩阵分块操作称为因子分解。这里,我们将使用一种矩阵因子分解的方法,称为RQ 因子分解。
将下面的方法添加到Camera 类中:
def factor(self):""" 将照相机矩阵分解为K、R、t,其中,P = K[R|t] """# 分解前3×3 的部分K,R = linalg.rq(self.P[:,:3])# 将K 的对角线元素设为正值T = diag(sign(diag(K)))if linalg.det(T) < 0:T[1,1] *= -1self.K = dot(K,T)self.R = dot(T,R) # T 的逆矩阵为其自身self.t = dot(linalg.inv(self.K),self.P[:,3])return self.K, self.R, self.tRQ 因子分解的结果并不是唯一的。在该因子分解中,分解的结果存在符号二义性。由于我们需要限制旋转矩阵R 为正定的(否则,旋转坐标轴即可),所以可以在求解到的结果中加入变换T 来改变符号。
观察照相机矩阵分解的效果: