3D感知技术(3)双目立体视觉测距
1. 针孔相机模型
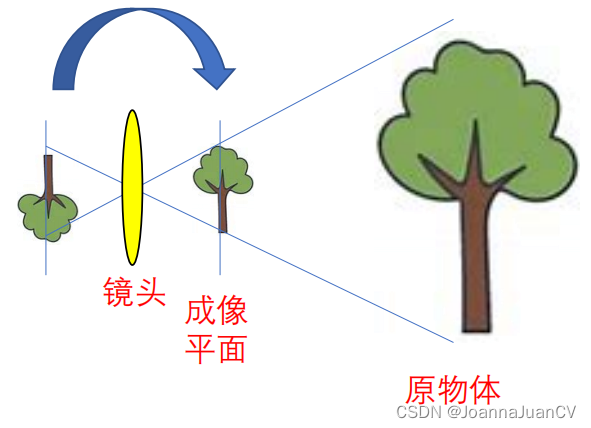
透镜模型可以简化为针孔模型——将透镜替换成小孔,光心对应小孔中心;
小孔成像是成倒立的像,但一般为了分析简单,将成像平面画在对称位置,这样图像不再颠倒。
针孔相机模型的成像过程包括:
-
空间的3D点和图像传感器上的位置关系(物理单位-物理单位):
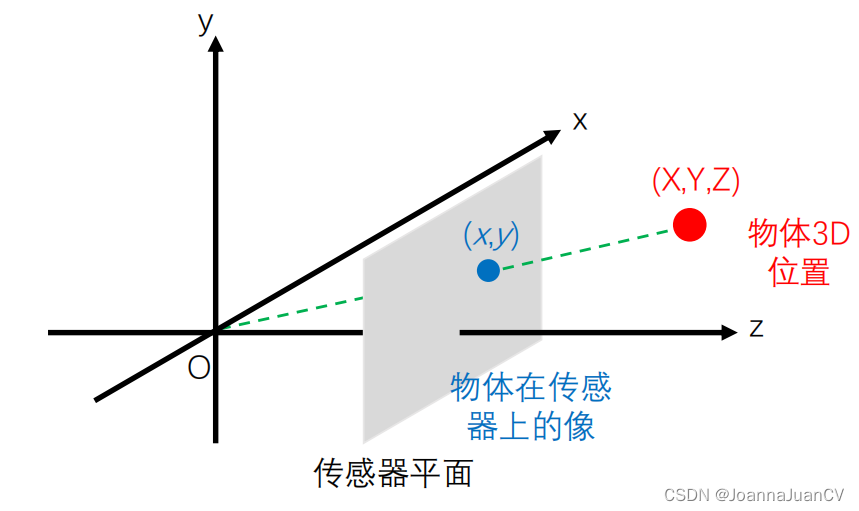
利用相似三角形能够看出图像传感器平面上的像素位置和3D空间点的位置关系:

-
图像传感器平面上点与图像坐标之间的位置关系(物理单位-像素单位):
图像坐标系的原点位于传感器平面的左上角,相机坐标系的原点位于传感器平面的中心,所以镜头中心对应的像素坐标(𝑐𝑥, 𝑐𝑦)不是(0,0),因此在计算像素坐标(𝑢, 𝑣)和3D物理坐标关系前,先平移(𝑢 − 𝑐𝑥, 𝑣 − 𝑐𝑦);同时,需要根据传感器物理尺寸将像素坐标乘以比例系数变成物理坐标。