14---OpenCV:图像检测之边缘检测
一、图像边缘
边缘(edge)是指图像局部强度变化最显著的部分。主要存在于目标与目标、目标与背景、区域与区域(包括不同色彩)之间,是图像分割、纹理特征和形状特征等图像分析的重要基础。图像强度的显著变化可分为:
-
阶跃变化函数,即图像强度在不连续处的两边的像素灰度值有着显著的差异
-
线条(屋顶)变化函数,即图像强度突然从一个值变化到另一个值,保持一较小行程后又回到原来的值
图像的边缘有方向和幅度两个属性,沿边缘方向像素变化平缓,垂直于边缘方向像素变化剧烈.边缘上的这种变化可以用微分算子检测出来,通常用一阶或二阶导数来检测边缘。
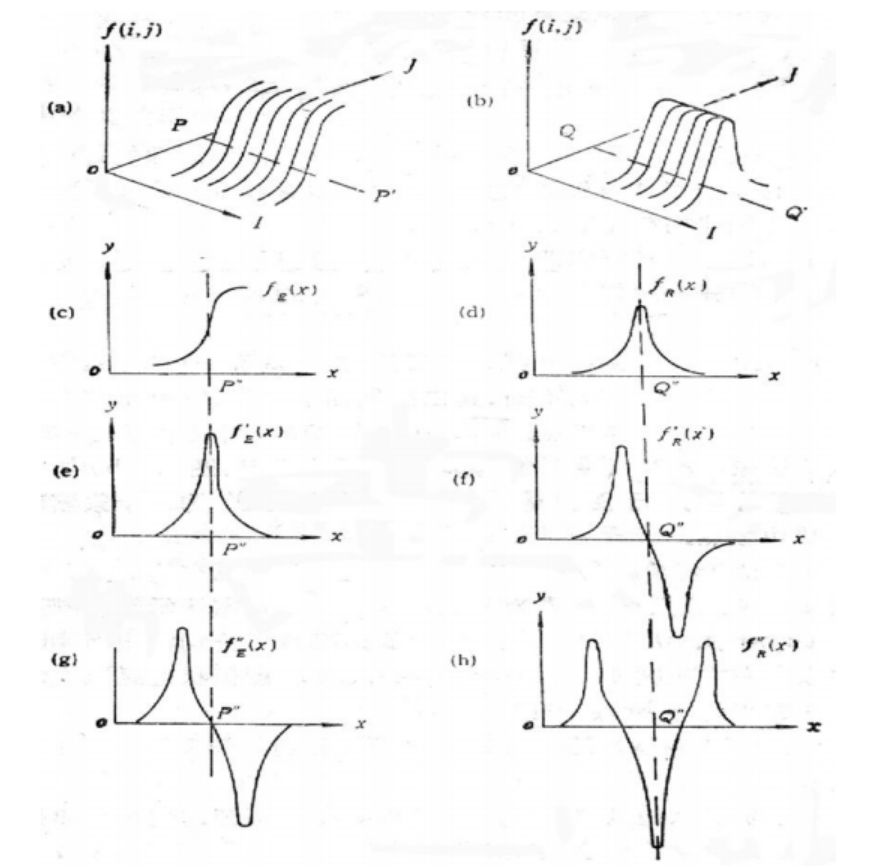
ab分别是阶跃函数和屋顶函数的三维图像
cd是阶跃和屋顶函数的函数二维图像
ef对应一阶导数
gh是二阶导数
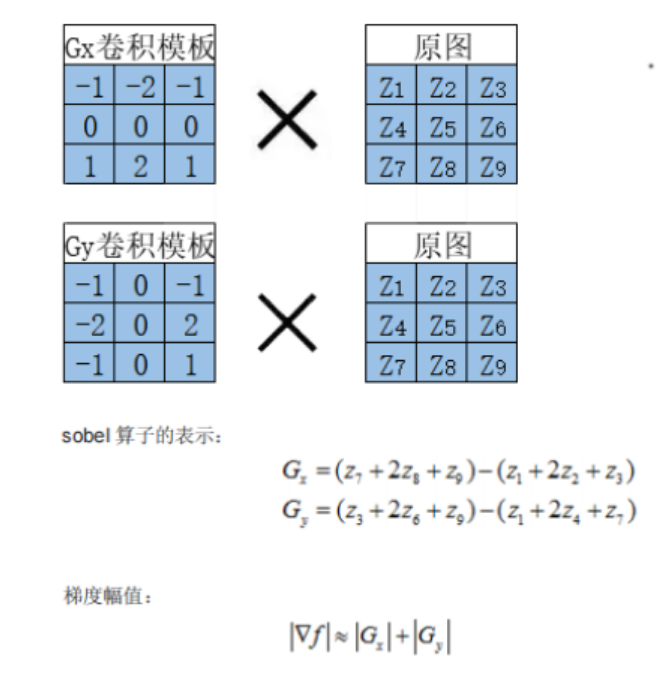
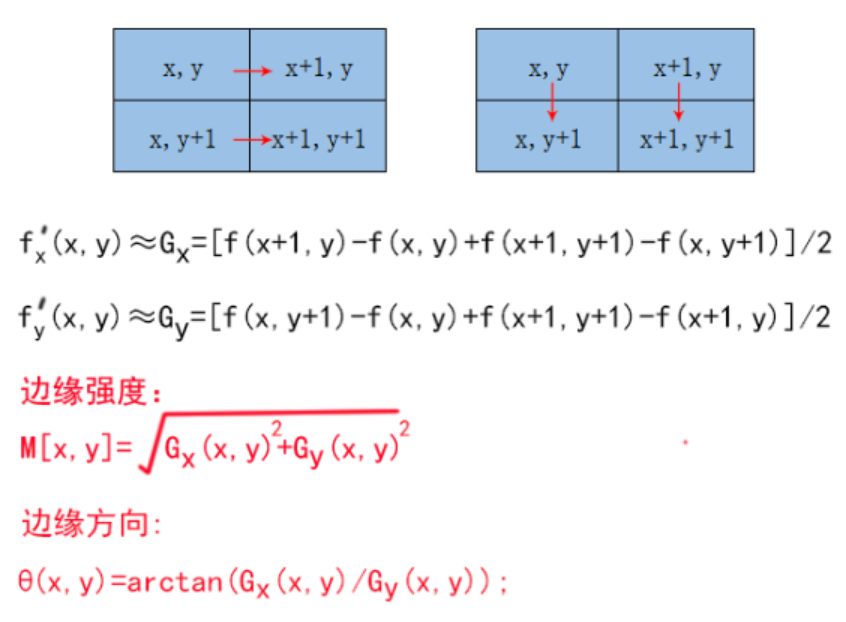
1.Sobel算子(索伯)
Sobel算子是一种常用的边缘检测算子,是一阶的梯度算法。对噪声具有平滑作用,提供较为精确的边缘方向信息,边缘定位精度不够高。当对精度要求不是很高时,是一种较为常用的边缘检测方法。
计算过程
API介绍
void Laplacian( InputArray src, OutputArray dst, int ddepth,int ksize = 1, double scale = 1, double delta = 0,int borderType = BORDER_DEFAULT );
/*******************************************************************
* src: 输入图
* dst: 输出图
* ddepth: 输出图深度 CV_16S/CV_32F/CV_64F等
* ksize: 核大小,必须是正奇数,默认值是1
* scale: 计算导数值时可选的缩放因子
* delta: 可选值,默认为0
* borderType: 边缘处理模式
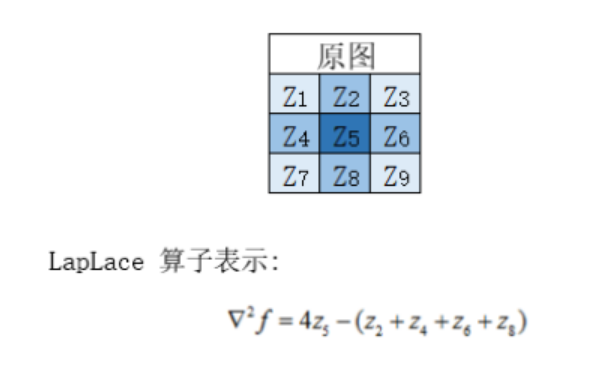
*********************************************************************/2.LapLace 算子(拉普拉斯)
拉普拉斯对噪声敏感,会产生双边效果。不能检测出边的方向。通常不直接用于边的检测,只起辅助的角色,检测一个像素是在边的亮的一边还是暗的一边利用零跨越,确定边的位置.
计算过程
API介绍
void Laplacian( InputArray src, OutputArray dst, int ddepth,int ksize = 1, double scale = 1, double delta = 0,int borderType = BORDER_DEFAULT );
/*******************************************************************
* src: 输入图
* dst: 输出图
* ddepth: 输出图深度 CV_16S/CV_32F/CV_64F等
* ksize: 核大小,必须是正奇数,默认值是1
* scale: 计算导数值时可选的缩放因子
* delta: 可选值,默认为0
* borderType: 边缘处理模式
*********************************************************************/3.Canny算子(坎尼)
计算过程
-
用高斯滤波器平滑图像
-
用一阶偏导的有限差分计算梯度的幅值核方向
-
对梯度幅值进行非极大值抑制
-
超过255 用255表示
-
低于0 用绝对值表示
-
-
用双阈值算法检测和连接边缘
API介绍
void Canny( InputArray image, OutputArray edges,double threshold1, double threshold2,int apertureSize = 3, bool L2gradient = false );
/*******************************************************************
* src: 输入图
* edges: 输出图
* threshold1: 第一个阈值
* threshold2: 第二个阈值
* apertureSize: 内核大小
* L2gradient: 计算图像梯度幅值方法的标志
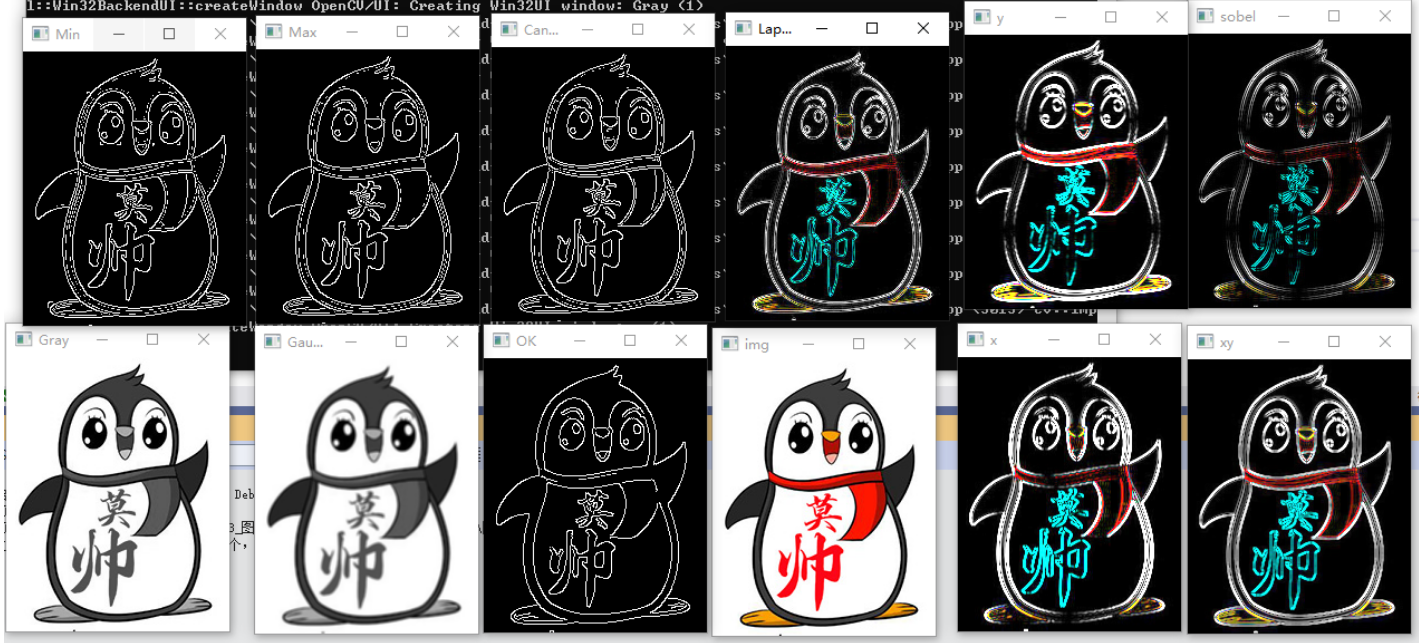
*********************************************************************/4.综合代码
注意:
①相关函数说明
convertScaleAbs(result["y"], result["y"]); //图像增强函数 addWeighted(result["x"], 0.5, result["y"], 0.5, 0, result["xy"]); //将两个图像按一定权值融合在一起②sobel算子和拉普拉斯算子处理完后效果并不会太好,需要调用图像增强函数。
#include <iostream>
#include <string>
#include <map>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
class Edge
{
public:
Edge() :img(imread("test.jpg"))
{
result["img"] = img;
}
void TestSobel()
{
Sobel(img, result["x"], CV_16S, 1, 0);
//图像增强
//α*src+β
convertScaleAbs(result["x"], result["x"]);
Sobel(img, result["y"], CV_16S, 0, 1);
convertScaleAbs(result["y"], result["y"]);
addWeighted(result["x"], 0.5, result["y"], 0.5, 0, result["xy"]);
Sobel(img, result["sobel"], CV_16S, 1, 1);
convertScaleAbs(result["sobel"], result["sobel"]);
}
void TestLapLacian()
{
Laplacian(img, result["LapLacian"], CV_16S);
convertScaleAbs(result["LapLacian"], result["LapLacian"]);
}
void TestCanny()
{
//高阈值
Canny(img, result["Canny"], 100, 200);
//灰度后的高阈值和低阈值
cvtColor(img, result["Gray"], COLOR_BGR2GRAY);
Canny(result["Gray"], result["Max"], 100, 200);
Canny(result["Gray"], result["Min"], 20, 40);
//高斯模糊后做双阈值
GaussianBlur(result["Gray"], result["Gauss"], Size(3, 3), 5);
Canny(result["Gauss"], result["OK"], 100, 200);
}
void Show()
{
for (auto& v : result)
{
imshow(v.first, v.second);
}
waitKey(0);
}
protected:
Mat img;
map<string, Mat> result;
};
int main()
{
unique_ptr<Edge> p(new Edge);
p->TestSobel();
p->TestLapLacian();
p->TestCanny();
p->Show();
return 0;
}显然最佳的方法是用二值化的灰度图像,然后高斯滤波处理,再去用canny检测算法(两个阈值的选定很重要---->要多试试)(得到的OK图像如下,边缘的线条很细,且取出了原本canny算法算出来的很多的噪声)